Use and Behavior of ET_ControlLoopParameter.UserCurrentLimit
Overview
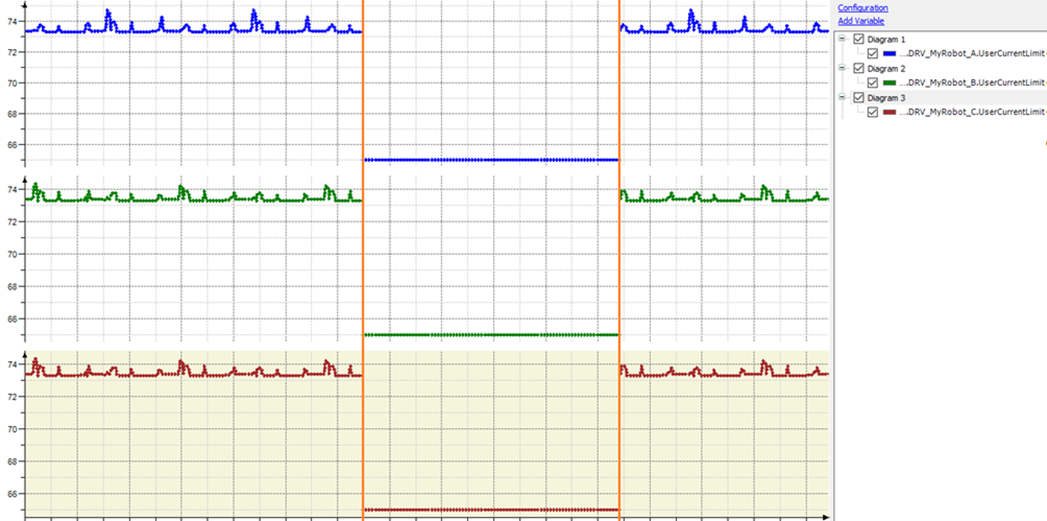
The trace shows the UserCurrentLimit of robot axes A, B and C. In case the value for UserDrivePeakCurrent of the drives A, B or C of the robot is set to a value greater than ST_DataPSeries.stAxesABC.lrUserDrivePeakCurrentDefault, then the UserCurrentLimit is set by an internal algorithm. At the first orange line, the SetControlLoopParameter method (for P-Series or T-Series) is called with a value to limit it to 65.0. At the second orange line, the SetControlLoopParameter method (for P-Series or T-Series) is called with a value to limit it to 100.0, this means it has no more effect and only the internal algorithm is limiting the UserCurrentLimit.