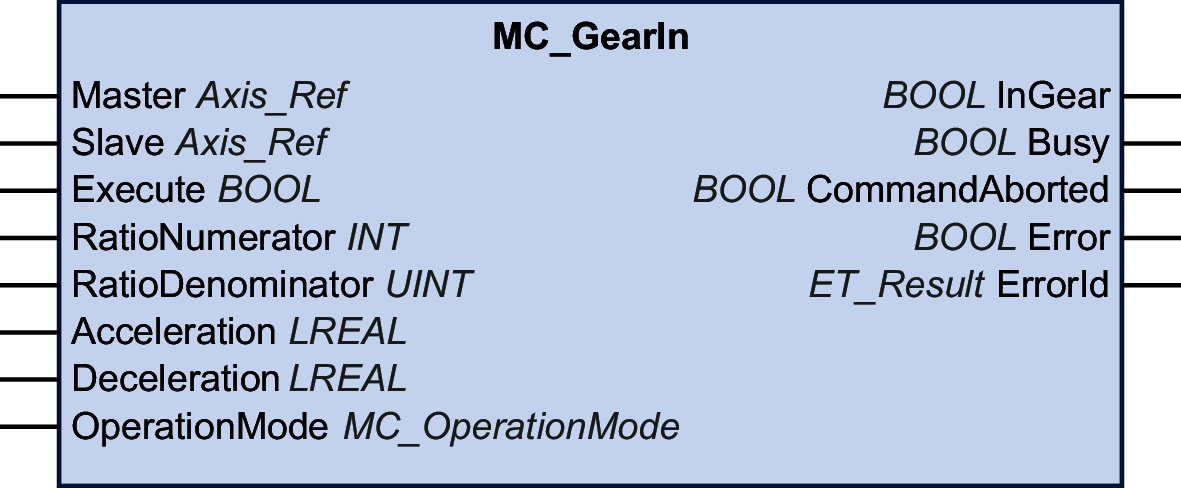
MC_GearIn
Descrizione funzionale
Questo blocco funzione attiva l'accoppiamento di un asse master e un asse subordinato con un determinato fattore di trasmissione tra posizione o velocità dell'asse master e dell'asse subordinato, in base al modo operativo.
L'asse subordinato segue in modo sincrono il movimento dell'asse master (sincronizzazione di posizione o velocità).
Gli ingressi RatioNumerator e RatioDenominator consentono di impostare un rapporto di trasmissione specifico dell'utente per il movimento dell'asse subordinato.
-
Nel modo operativo Cyclic Synchronous Position, l'accoppiamento viene eseguito in base ai valori di posizione. Ad esempio, con un rapporto di trasmissione di 1:2, l'asse subordinato si sposta di metà della distanza del master.
-
Nel modo operativo Cyclic Synchronous Velocity, l'accoppiamento viene eseguito in base ai valori di velocità. Ad esempio, con un rapporto di trasmissione di 1:2, l'asse subordinato si muove a metà della velocità del master.
Ingressi
|
Ingresso |
Tipo di dati |
Descrizione |
|---|---|---|
|
Master |
Axis_Ref |
Riferimento all'asse per cui deve essere eseguito il blocco funzione. |
|
Slave |
Axis_Ref |
Riferimento all'asse per cui deve essere eseguito il blocco funzione. |
|
Execute |
BOOL |
Campo valori: FALSE, TRUE. Valore predefinito: FALSE. Un fronte di salita dell'ingresso Execute avvia il blocco funzione. Il blocco funzione continua a essere eseguito e l'uscita Busy è impostata a TRUE. È possibile riavviare questo blocco funzione durante l'esecuzione. I valori di destinazione vengono sovrascritti dai nuovi valori nel momento in cui si verifica il fronte di salita. |
|
RatioNumerator |
INT |
Intervallo valori: -2147483648...2147483647 Valore predefinito: 1 Numeratore del rapporto di trasmissione.
NOTA: Il valore 0 non è valido.
|
|
RatioDenominator |
UINT |
Intervallo valori: 1...2147489647 Valore predefinito: 1 Denominatore del rapporto di trasmissione. |
|
Acceleration |
LREAL |
Campo valori: un valore LREAL positivo Valore predefinito: 0 Accelerazione in unità definite dall'utente. Il valore su questo ingresso viene utilizzato per raggiungere la velocità di destinazione specificata (accelerazione). |
|
Deceleration |
LREAL |
Campo valori: un valore LREAL positivo Decelerazione in unità definite dall'utente. Valore predefinito: -1
NOTA: Se il valore predefinito di -1 presentato all'ingresso Deceleration viene utilizzato come segnale che il parametro non è stato modificato, pertanto, per la decelerazione viene utilizzato anche il valore all'ingresso Acceleration.
Si tratta del valore di soglia dell'accelerazione durante la fase di salita in rampa di MC_GearIn nel caso in cui il valore assoluto della velocità dell'asse subordinato diminuisca. |
|
OperationMode |
Modo operativo per blocco funzione Valore predefinito: Position |
Uscite
|
Uscita |
Tipo di dati |
Descrizione |
|---|---|---|
|
InGear |
BOOL |
Campo valori: FALSE, TRUE. Valore predefinito: FALSE.
|
|
Busy |
BOOL |
Campo valori: FALSE, TRUE. Valore predefinito: FALSE.
|
|
CommandAborted |
BOOL |
Campo valori: FALSE, TRUE. Valore predefinito: FALSE.
|
|
Error |
BOOL |
Campo valori: FALSE, TRUE. Valore predefinito: FALSE.
|
|
ErrorID |
Questa enumerazione fornisce informazioni diagnostiche. |
Note
L'ingresso Acceleration deve essere impostato a un valore maggiore di 0 prima che venga eseguito il blocco funzione.
È possibile modificare il rapporto di trasmissione durante un movimento. Tuttavia, i nuovi valori vengono presi in considerazione solo con il successivo fronte di salita dell'ingresso Execute.
L'asse subordinato utilizza i valori di Acceleration e Jerk solo durante la prima fase di accelerazione. L'asse subordinato segue quindi l'asse master.
Se il modo operativo è impostato su Velocity tramite l'ingresso OperationMode e se l'azionamento non è in grado di funzionare nel modo operativo Cyclic Synchronous Velocity, il blocco funzione MC_CamIn rileva un errore. L'asse non viene interessato.
La libreria non fornisce un blocco funzione separato MC_GearOut. Un blocco funzione in esecuzione può essere sostituito da un altro blocco funzione.