Funzione STO – Safe Torque Off (coppia disinserita in modo sicuro)
Descrizione generale del funzionamento
La funzione STO è una rudimentale funzione di sicurezza integrata del drive. Se è attiva STO, il motore non riceve più alimentazione e non produce più rotazione o movimento. La sezione di potenza del drive non trasmette più al motore l'energia necessaria per generare coppia o forza nel caso di un motore lineare.
Alla funzione STO attiva consegue un'inibizione di avvio/riavvio (si veda la sezione sotto).
La funzione STO impedisce un avvio accidentale secondo la norma EN 60204-1, sezione 5.4. Quando la funzione designata STO è attiva, la sezione di potenza del drive è disattivata. La coppia del drive è disattivata. Questo stato viene monitorato internamente dal drive.
Richiesta/monitoraggio del BF di sicurezza / logica di sicurezza
In seguito all'attivazione di STO, la coppia del drive viene disinserita immediatamente e l'asse rallenta fino a velocità zero.
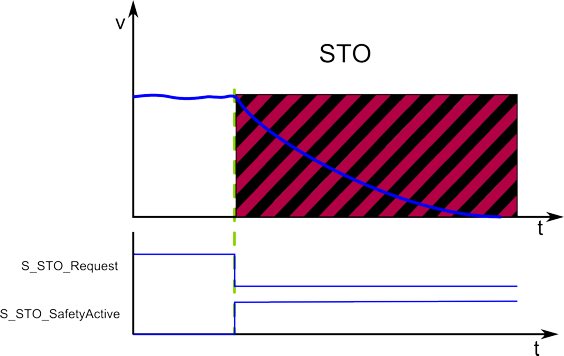
Quando viene richiesta STO, la funzione di sicurezza viene eseguita immediatamente. STO si può richiedere commutando il segnale all'ingresso S_STO_Request a SAFEFALSE (se l'ingresso Activate = TRUE) o tramite il collegamento cablato fisso (se il parametro di dispositivo del HW_STO = Activated). Fare riferimento alla sezione sottostante.
Lo stato di coppia disinserita del drive viene indicato commutando l'uscita S_STO_SafetyActive del blocco di funzione a SAFETRUE.
Dopo aver segnalato che la funzione STO è attiva, l'asse rallenta. Pertanto, S_STO_SafetyActive = SAFETRUE non implica necessariamente che l'asse sia fermo. Il tempo di rallentamento fino all'arresto dipende dalle proprietà fisiche dei componenti utilizzati, ad esempio da peso, coppia, frizione ecc.
| AVVERTIMENTO | |
|---|---|
Applicazione
Dato che la funzione STO del drive disabilita la sezione di potenza del motore, la funzione si presta all'utilizzo in applicazioni nelle quali l'asse si ferma da sé in un tempo sufficientemente breve per via della sua coppia di carico o frizione oppure quando il rallentamento dell'asse non ha rilevanza per la sicurezza.
STO come stato di sicurezza generale definito: La funzione STO è definita come lo stato di sicurezza preimpostato. Costituisce perciò la funzione di fallback finale per tutte le altre funzioni di sicurezza descritte in questa documentazione.
Richiesta di STO trasmessa tramite blocco di funzione o collegamento cablato
A seconda dei requisiti e dell'implementazione del vostro sistema, la funzione STO può essere richiesta in due modi:
-
tramite l'ingresso S_STO_Request del blocco di funzione (trasmesso tramite bus SERCOS);
-
in aggiunta tramite il collegamento di segnale cablato fisso. A tal fine, il parametro
HW_STOdeve essere impostato suActivated(si veda la sezione sotto).
Si veda anche l'argomento "STO cablato" per maggiori informazioni.
Inibizione di avvio: STO segue all'attivazione del blocco di funzione
Dopo l'avvio, la logica di sicurezza automaticamente entra in stato sicuro definito STO. In base alla rilevante norma IEC 60204-1, la funzione STO esegue un arresto di categoria 0. Questa categoria di arresto implica una seguente inibizione di avvio. L'inibizione di avvio si può rimuovere solo con un fronte ascendente sull'ingresso Reset del blocco di funzione di sicurezza.
Inibizione di riavvio seguente a STO
Dopo aver rimosso una richiesta di funzione STO commutando il relativo ingresso del blocco di funzione da SAFEFALSE a SAFETRUE, diventa automaticamente attiva un'inibizione di riavvio per contribuire a prevenire il riavvio accidentale dell'asse. In base alla rilevante norma IEC 60204-1, la funzione STO esegue un arresto di categoria 0. Questa categoria di arresto implica una seguente inibizione di riavvio. L'inibizione di riavvio si può rimuovere solo con un fronte ascendente sull'ingresso Reset del blocco di funzione di sicurezza.
Parametri di dispositivo rilevanti del modulo/della logica di sicurezza
Come editare i rilevanti parametri del dispositivo di sicurezza: Nella finestra 'Dispositivi' di EcoStruxure Machine Expert - Safety, ...
-
cliccare sul modulo di sicurezza nell'albero dei dispositivi.
-
Nell'Editore di parametrizzazione dispositivi a destra, scorrere fino alla sezione parametri che interessa (si veda l'intestazione della tabella sottostante).
-
Specificare i parametri per questa funzione di sicurezza elencati nella tabella qui sotto.
Per informazioni dettagliate sulla fascia di valori e il valore predefinito di ciascun parametro, vedere il corrispondente capitolo nella guida "Parametri e elementi per dati di processo del modulo di sicurezza" del modulo di sicurezza utilizzato.
|
Sezione parametri: Basic |
|
|---|---|
|
|
|
| AVVERTIMENTO | |
|---|---|
Ingressi/uscite rilevanti del BF e bit nella word di stato
-
Richiesta di funzione tramite l'ingresso S_STO_Request = SAFEFALSE del BF..
-
Indicazione dello stato della funzione tramite l'uscita S_STO_SafetyActive (SAFETRUE = funzione di sicurezza attivata) del BF.
Nella DWORD emessa su AxisStatus
bit 0:
HW_STO(TRUE = parametro del modulo di logica di sicurezzaHW_STOimpostato aActivated)bit 1: stato STO (TRUE = funzione di sicurezza attivata)