Diagrammi di sequenza segnali addizionali
I diagrammi di sequenza segnali in questa documentazione possono omettere determinati codici diagnostici. Ad esempio, è possibile che un codice diagnostico non sia visualizzato quando il relativo stato del blocco di funzione è uno stato di transizione temporaneo ed è attivo solo per la durata di un ciclo del Safety Logic Controller.
Sono illustrate solo le tipiche combinazioni di segnali in ingresso. Sono possibili altre combinazioni di segnale.
Il diagramma di sequenza segnali è semplificato e intende spiegare il funzionamento del blocco di funzione di sicurezza SF_SafeMotionControl. L'esempio perciò non va inteso come soluzione praticabile nel modo illustrato e descritto in questo documento.
Le aree più significative dei diagrammi di sequenza segnali sono evidenziate in colore.
Vedere anche il diagramma nella vista d'assieme per questo blocco di funzione.
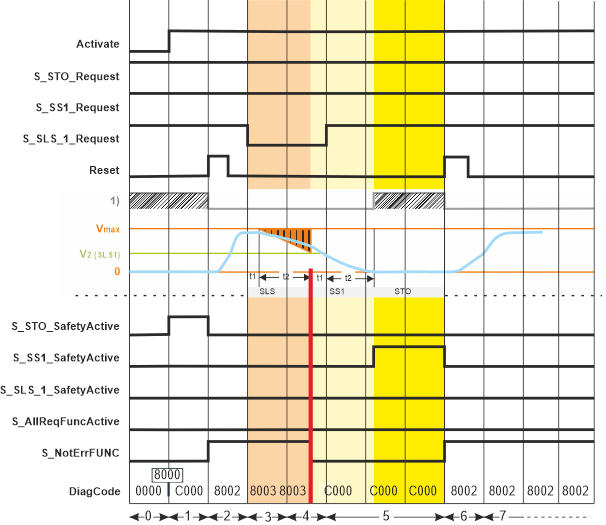
Nella seguente sequenza esemplare, la funzione di sicurezza SLS1 richiesta da un dispositivo di comando di sicurezza (un interruttore a chiave per la richiesta di aprire uno sportello, ad esempio) non è attivabile correttamente. Perciò, prima SS1 e poi STO vengono attivate in qualità di funzioni fallback della funzione di sicurezza SLS1.
Il monitoraggio rampa è disattivato per entrambe le funzioni di monitoraggio di sicurezza SLS1 e SS1 con l'impostazione *_RampMonitoring a Deactivated del corrispondente parametro di dispositivo.
1) Inibizione interna di avvio/riavvio
|
0 |
Il blocco di funzione non è attivato (Activate = FALSE). Di conseguenza, tutte le uscite sono FALSE/SAFEFALSE. |
|
1 |
Dopo l'avvio, la logica di sicurezza entra automaticamente in stato sicuro definito STO (8000). Dopo la sua attivazione (commutando Activate = TRUE), il blocco di funzione indica questo stato con S_STO_SafetyActive = SAFETRUE. Come conseguenza dello stato STO è attiva l'inibizione di avvio interna. (In base alla rilevante norma IEC 60204-1, la funzione STO esegue un arresto di categoria 0. Questa categoria di arresto implica una seguente inibizione di avvio.) All'attivazione del blocco, l'uscita S_NotErrFUNC commuta a SAFETRUE, segnalando che il blocco di funzione non ha rilevato errori. Poi il BF automaticamente passa in stato di errore C000. Durante C000 (indicato da S_NotErrFUNC = SAFEFALSE) lo stato STO viene mantenuto. |
|
2 |
Con un fronte FALSE > TRUE all'ingresso Reset del blocco di funzione di sicurezza, l'inibizione di avvio viene rimossa. Dopo questo reset il blocco esce dallo stato STO. Poiché al momento non è richiesta funzione di sicurezza, l'uscita S_STO_SafetyActive commuta nuovamente a SAFEFALSE, mentre le altre uscite del blocco di funzione conservano i loro stati precedenti. Dato che questa condizione è soddisfatta, il controllore standard (non relativo alla sicurezza) può dare inizio al funzionamento del drive accelerando l'asse alla velocità parametrizzata. |
|
3 |
È richiesta la funzione di sicurezza SLS1: Il segnale all'ingresso S_SLS_1_Request commuta a SAFEFALSE in seguito, ad esempio, all'apertura di un interruttore a chiave.
Entro l'intervallo di tempo t1, il controllore standard (non relativo alla sicurezza) riceve anch'esso la richiesta dal processo collegato e avvia la funzione di controllo del movimento in base alla logica e alla parametrizzazione del drive definita nell'applicazione standard (non relativa alla sicurezza). t1 si definisce nei parametri di dispositivo del logica di sicurezza ( Al decorso di t1, la decelerazione del drive alla velocità traguardo V2 viene eseguita dal controllore standard (non relativo alla sicurezza) in base alla parametrizzazione del drive definita nell'applicazione standard. Durante la fase di decelerazione t2 (rampa in discesa), nel nostro esempio il monitoraggio della rampa è disattivato. Ciò significa che il monitoraggio non è attivo durante t2 ma la velocità finale viene controllata al termine di t2. |
|
4 |
La velocità limitata parametrizzata V2 non viene raggiunta prima del decorso del tempo di monitoraggio t2 definito. In conseguenza dell'errore di velocità rilevato,
|
|
5 |
Al decorso di t1 (funzione SS1), la decelerazione del drive per fermare l'asse viene eseguita dal controllore standard (non relativo alla sicurezza). Durante la fase di decelerazione t2 (rampa in discesa), il monitoraggio della rampa SS1 è disattivato nel nostro esempio. Ciò significa che il monitoraggio non è attivo durante t2 di SS1 ma la velocità finale deve essere zero al termine di t2 di SS1. Al termine di t2, la velocità è zero e STO è attivo. La coppia dell'asse è disattivata e lo stato di fermo viene monitorato. L'uscita S_SS1_SafetyActive commuta a SAFETRUE per indicare che la funzione SS1 è attiva. Nel frattempo, la macchina viene preparata al riavvio mediante la rimozione dell'errore verificatosi. La richiesta della funzione di sicurezza SLS1 si rimuove commutando il segnale all'ingresso S_SLS_1_Request nuovamente a SAFETRUE (ad es., bloccando l'interruttore a chiave). La coppia del drive però resta disattivata a causa dell'inibizione di riavvio implementata. |
|
6 |
Con un fronte FALSE > TRUE all'ingresso Reset del blocco di funzione di sicurezza si può rimuovere l'inibizione di riavvio. L'uscita S_SS1_SafetyActive commuta nuovamente a SAFEFALSE e S_NotErrFUNC = SAFETRUE segnala l'assenza di errori. Non essendo richiesta alcuna funzione di sicurezza, il controllore standard (non relativo alla sicurezza) può accelerare l'asse finché questo non raggiunge la velocità programmata (parametrizzata nell'applicazione di movimento standard (non relativa alla sicurezza)) senza superare la velocità di sicurezza massima (Vmax) definita e monitorata permanentemente. |