Mounting the Gripper
|
Step |
Action |
|---|---|
|
1 |
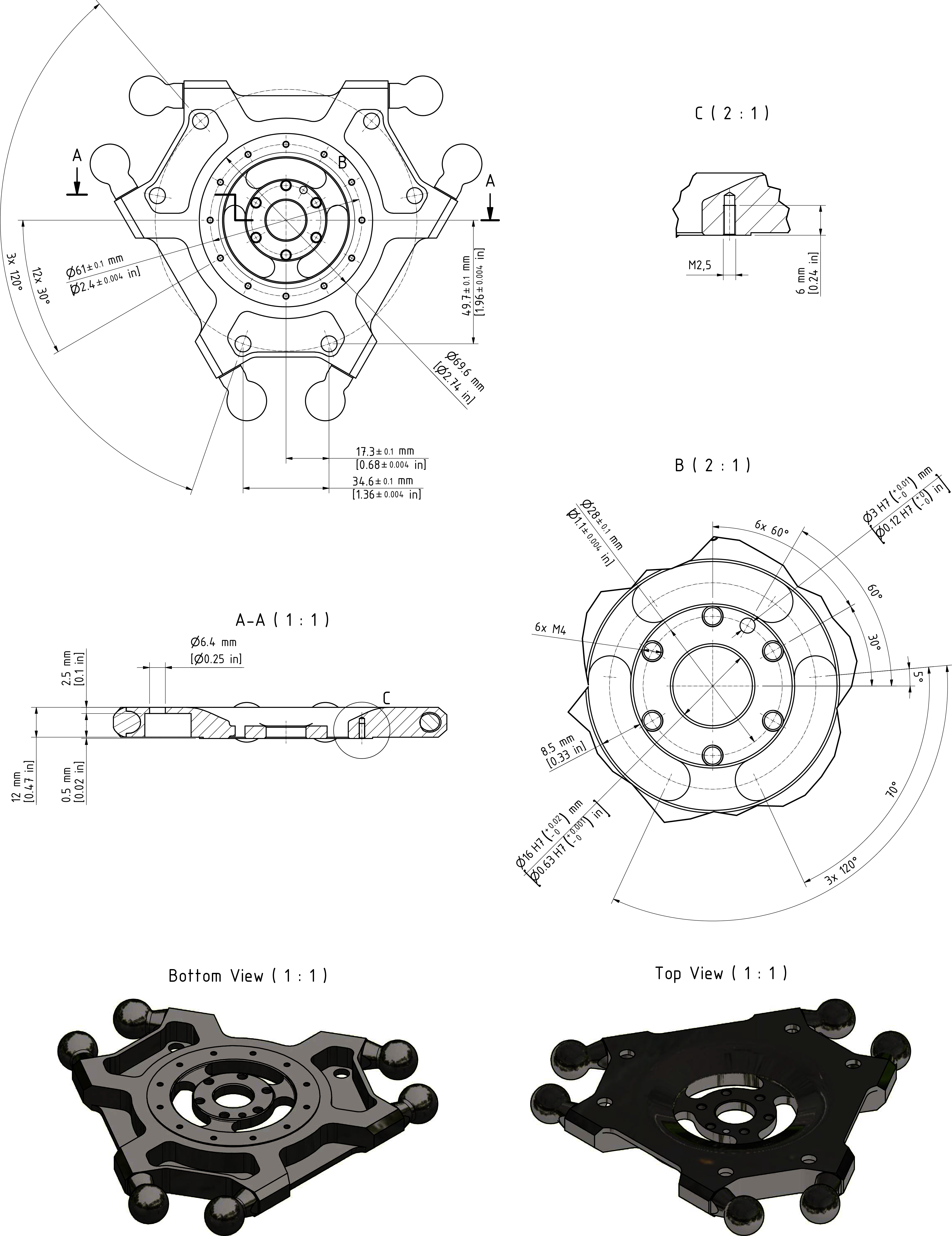
Fasten the gripper to the mounting points provided for this purpose on the parallel plate (1) for robots with a rotational axis:
Use the medium strength threadlocking adhesive Loctite 243 for this purpose. For further information, refer to Flange Dimensions for Robots with Three Axes or Flange Dimensions for Robots with a Rotational Axis. 
NOTE: The mounting points on the parallel plate for robots without a rotational axis (4) are identical, but doubled.
|
|
2 |
Calibrate the rotational axis if this has not yet been done before the mounting of the gripper.
NOTE:
|