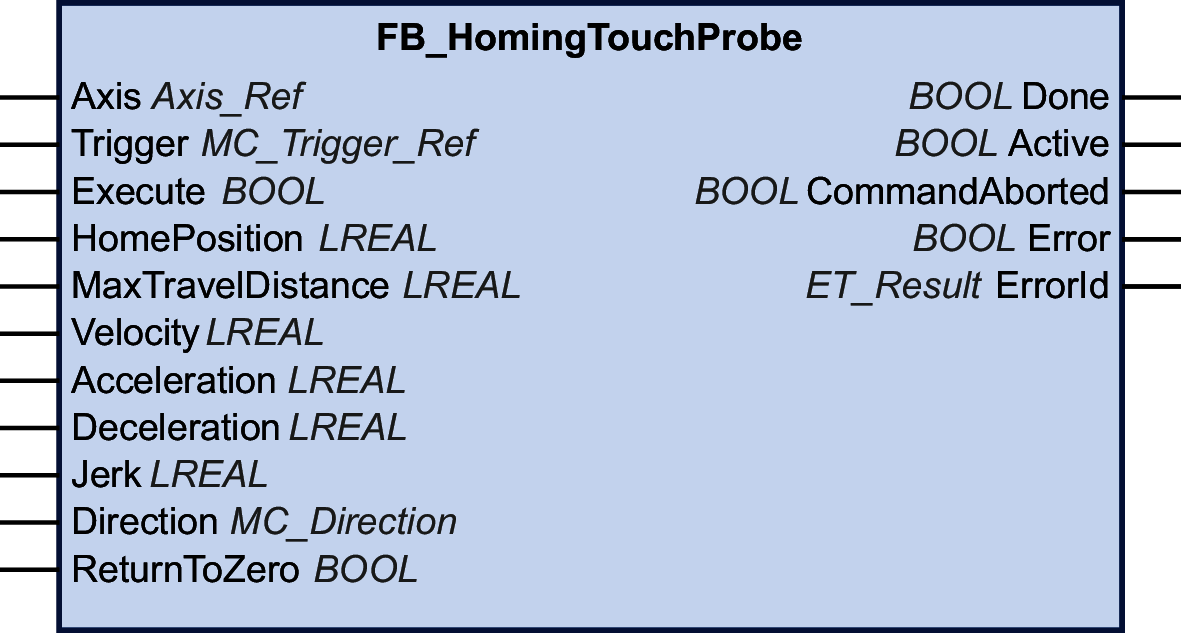
FB_HomingTouchProbe
功能描述
此功能块可让您将驱动器归位到接触式探测器的位置捕捉值。此类型的回归由控制器控制(有关驱动器控制回归,请参阅 MC_Home)。
输入 Trigger 指定要检测的捕捉信号的跳变沿(下降沿或上升沿)。回归运动的方向在输入 Direction 中设置。输入 MaxTravelDistance 用于指定回归运动的最大距离。如果在此距离内未检测到捕捉信号的跳变沿,则功能块的执行以检测到错误而中止。
回归运动已启动(输入 Acceleration 和 Jerk),按照在输入 Direction 中设置的方向达到恒定速度(输入 Velocity)。
检测到捕捉信号的指定跳变沿时,会将相应的位置值设置为回归位置。运动按照在输入 Deceleration 中设置的减速度值减速。
根据输入 ReturnToZero 的值,运动将停止 (FALSE) 或继续到达零点 (TRUE)。
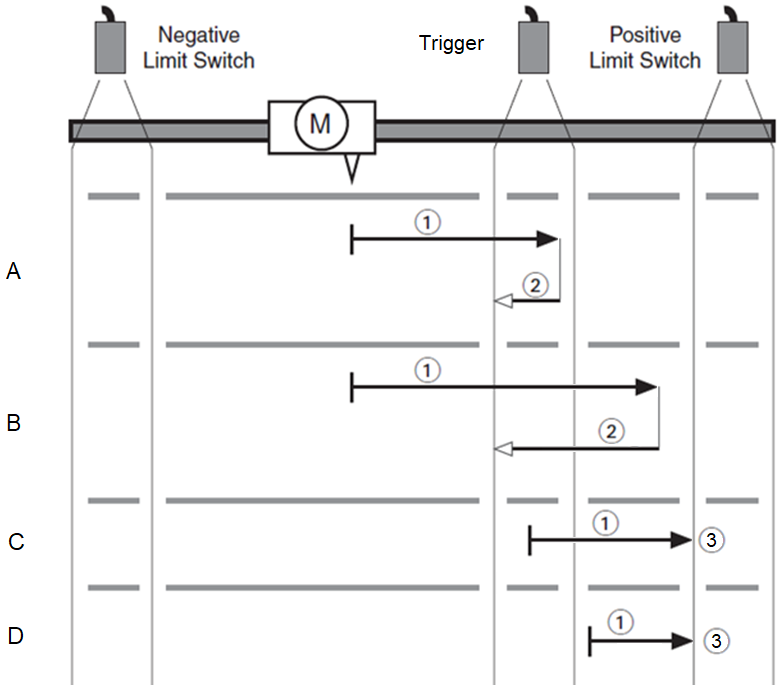
采用以下输入设置的示例 1:
-
Direction: PositiveDirection
-
Trigger: RisingEdge
运动:
|
项目 |
运动 |
|---|---|
|
1 |
回归运动(搜索位置捕捉信号的跳变沿)。 |
|
2 |
向零点运动(如果 ReturnToZero 设置为 TRUE)。 |
|
3 |
向限位开关运动(回归失败)。 |
情形:
|
项目 |
情形 |
|---|---|
|
A |
回归运动按照输入 Velocity 中的低值执行 (1)。检测到上升沿且运动停止。在回归运动后,将执行向零点的运动 (2)。 |
|
B |
回归运动按照输入 Velocity 中的高值执行 (1)。检测到上升沿且运动停止。在回归运动后,将执行向零点的运动 (2)。 |
|
C |
回归运动在上升沿之后、下降沿之前启动 (1),即在触发器上启动。运动通过限位开关停止 (3)。由于无法在上升沿和下降沿之间的位置启动回归运动,因此回归失败。 |
|
D |
回归运动在下降沿之后启动 (1)。运动通过限位开关停止 (3)。回归失败。 |
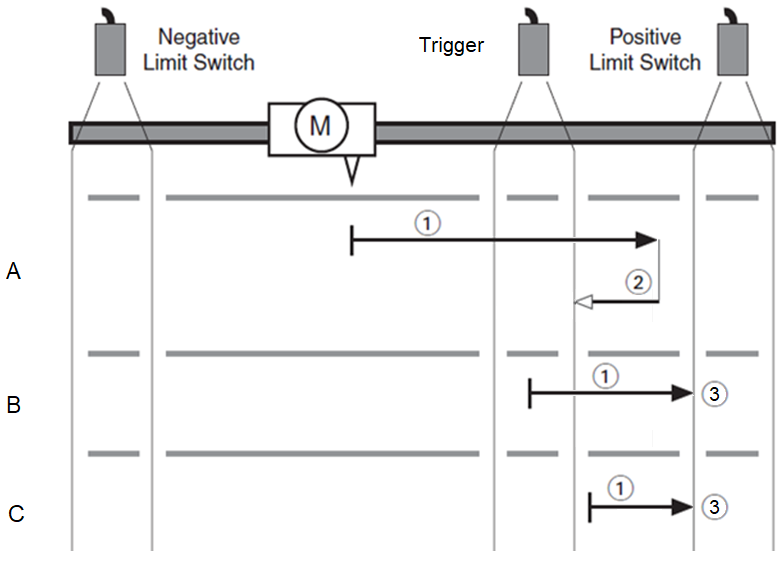
采用以下输入设置的示例 2:
-
Direction: PositiveDirection
-
Trigger: FallingEdge
运动:
|
项目 |
运动 |
|---|---|
|
1 |
回归运动(搜索位置捕捉信号的跳变沿)。 |
|
2 |
向零点运动(如果 ReturnToZero 设置为 TRUE)。 |
|
3 |
向限位开关运动(回归失败)。 |
情形:
|
项目 |
情形 |
|---|---|
|
A |
执行回归运动 (1)。检测到下降沿且运动停止。在回归运动后,将执行向零点的运动 (2)。 |
|
B |
回归运动在上升沿和下降沿之间启动 (1),即在触发器上启动。运动通过限位开关停止 (3)。由于无法在上升沿和下降沿之间的位置启动回归运动,因此回归失败。 |
|
C |
回归运动在下降沿之后启动 (1)。运动通过限位开关停止 (3)。回归失败。 |
通过库中的 IDNs 来检测位置捕捉信号的跳变沿。这意味着延迟,该延迟取决于必须调用功能块才能完成的情况出现的频率。如果输入 ReturnToZero 设置为 FALSE,则延迟对应于功能块的输出 Done 设置为 TRUE 后到接触式探测器的距离。
开始执行功能块时,轴属性 IsHomed 设置为 FALSE。一旦输入 HomePosition 设置为轴位置,轴属性 IsHomed 即设置为 TRUE。
如果在回归运动期间触发了硬件限位开关,则功能块的执行以检测到错误 (DriveInError) 而中止。
在执行了功能块之后,既不能启动功能块作为缓冲功能块,也不能执行缓冲功能块。
只有在轴处于 PLCopen 运行状态 StandStill 时,才能启动该功能块。功能块执行后允许的 PLCopen 运行状态为 Stopping、ErrorStop 或 StandStill.
输入
|
输入 |
数据类型 |
描述 |
|---|---|---|
|
Axis |
Axis_Ref |
对将执行功能块的轴的引用。 |
|
Trigger |
引用将执行功能块的驱动器的位置捕捉源。功能块检测捕捉信号的指定跳变沿,并使轴回归到此位置值。 可能的值:
如果值无效,则功能块执行以检测到错误 (InvalidCaptureSource) 而中止。 如果在启动功能块时正在使用指定位置捕捉源,则功能块的执行以检测到错误 (CaptureSourceAlreadyInUse) 而中止。 如果位置捕捉信号的指定跳变沿无效,则功能块的执行以检测到错误 (InvalidCaptureEdge) 而中止。 如果触发器被功能块 MC_AbortTrigger 中止,则功能块的执行以检测到错误 (TriggerExternalAborted) 而中止。 |
|
|
Execute |
BOOL |
值范围:FALSE,TRUE。 缺省值: FALSE。 输入 Execute 的上升沿可启动功能块。功能块持续执行,且输出 Busy 设置为 TRUE。 当功能块处于执行状态中时,输入 Execute 处的上升沿将被忽略。 |
|
HomePosition |
LREAL |
值范围:LREAL 值 缺省值:0 以用户自定义单位表示的位置,在检测到捕捉信号的指定跳变沿时设置为回归位置。 如果将该值设置为模数轴模数范围之外的值,则会检测到错误 (PositionOutsideModulo)。 如果将该值设置为线性轴允许的运动范围之外的值,则会检测到错误 (HomePositionOutsideLimits)。
注: 回归后,由于减速到停止,轴位置与检测到的回归位置不同(在定速 (Deceleration) 回归运动期间,检测到位置捕捉信号的跳变沿后的 Velocity 输入)。
|
|
MaxTravelDistance |
LREAL |
值范围:正或负 LREAL 值 缺省值:0 用于搜索捕捉信号跳变沿的运动的最大距离,以用户自定义单位表示。 行为:
|
|
Velocity |
LREAL |
值范围:正 LREAL 值 缺省值:0 匀速回归运动的速度值,以用户自定义单位表示。 如果值为负或零,则功能块的执行以检测到错误 (NonPositiveHomingVelocity) 而中止。 |
|
Acceleration |
LREAL |
值范围:正 LREAL 值 缺省值:0 匀速回归运动的加速度值,以用户自定义单位表示。 如果值为负或零,则功能块的执行以检测到错误 (AccelerationOutOfRange) 而中止。 |
|
Deceleration |
LREAL |
值范围:正 LREAL 值 缺省值:0 检测到捕捉信号跳变沿后回归运动的减速度值,以用户自定义单位表示。 如果值为负或零,则功能块的执行以检测到错误 (DecelerationOutOfRange) 而中止。 |
|
Jerk |
LREAL |
值范围:正 LREAL 值 缺省值:0
|
|
Direction |
缺省值:PositiveDirection 回归运动的方向。 可能的值:
如果值无效,则功能块执行以检测到错误 (DirectionInvalid) 而中止。 有关值描述,请参阅 MC_Direction。 |
|
|
ReturnToZero |
BOOL |
值范围:FALSE,TRUE。 缺省值: FALSE。 TRUE:在设置了回归位置后,运动继续到零位置(对应于 MC_MoveAbsolute 设置为位置 0.0 的运动)。
注: 如果在 ReturnToZero 设置为 TRUE 的情况下执行功能块 MC_SetPosition,则向零点的运动按最初的计算继续。
FALSE:设置回归位置后不执行任何运动。 只要归零运行持续,PLCopen 运行状态就仍为 Homing。 |
输出
|
输出 |
数据类型 |
描述 |
|---|---|---|
|
Done |
BOOL |
值范围:FALSE,TRUE。 缺省值: FALSE。
|
|
Active |
BOOL |
值范围:FALSE,TRUE。 缺省值: FALSE。
|
|
CommandAborted |
BOOL |
值范围:FALSE,TRUE。 缺省值: FALSE。
|
|
Error |
BOOL |
值范围:FALSE,TRUE。 缺省值: FALSE。
|
|
ErrorID |
此枚举提供诊断信息。 |