IF_LinearTrackingVelOverrideScaling - EvaluateScaledVelOverride (Method)
Task
This method is used to evaluate a scaled velocity override value based on the state of the robot and the reachability of a target in a linear tracking system.
Description
This method evaluates a velocity override value to scale the velocity of a robot during its motion toward a target in a linear tracking system. The scaling is adjusted based on the reachability of the target, the time required by the robot to reach it and the velocity of the linear tracking system.
-
Before calling this method, a successful call of the Configuration method must be performed. If the function block is properly configured, the property xConfigDone is set to TRUE.
-
The scaled velocity override value is returned by the method but not automatically applied to the robot.
Interface
|
Input |
Data type |
Description |
|---|---|---|
|
i_stTargetPosition |
SE_MATH.ST_Vector3D |
Target position to be reached in relation to the tracking coordinate system. |
|
i_etTrackingCoordinateSystem |
ROB.ET_CoordinateSystem |
Specification of the coordinate system to be considered in the calculation. The positions i_stTargetPosition and i_lrTrackingContactPosition are referring to this coordinate system. |
|
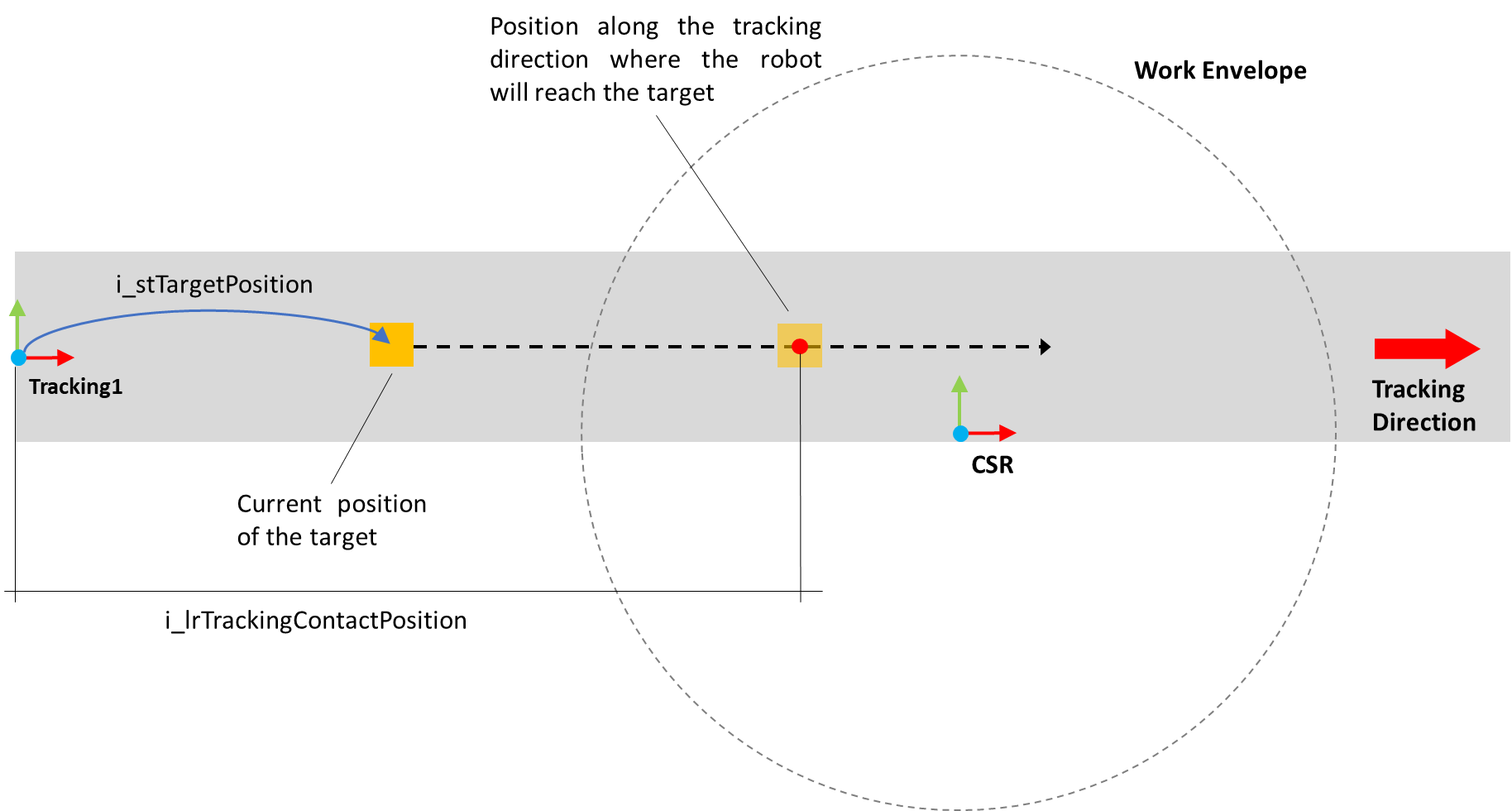
i_lrTrackingContactPosition |
LREAL |
Position along the tracking direction where the robot will reach the target. |
|
i_lrMaxVelOverride |
LREAL |
Maximum velocity override that the robot is allowed to use for the motion. |
|
Input |
Data type |
Description |
|---|---|---|
|
q_xError |
BOOL |
TRUE: An error occurred during last command. For more information, refer to q_etResult and q_sResultMsg. |
|
q_etResult |
Provides diagnostic and status information. If q_xError = FALSE, then q_etResult provides status information. If q_xError = TRUE, then q_etResult provides diagnostic/error information. The enumeration ET_Result contains the possible values of the POU operation results. |
|
|
q_sResultMsg |
STRING[80] |
Provides additional information about the status of the POU. |