IF_TeachingOrientation - AddSample (Method)
Description
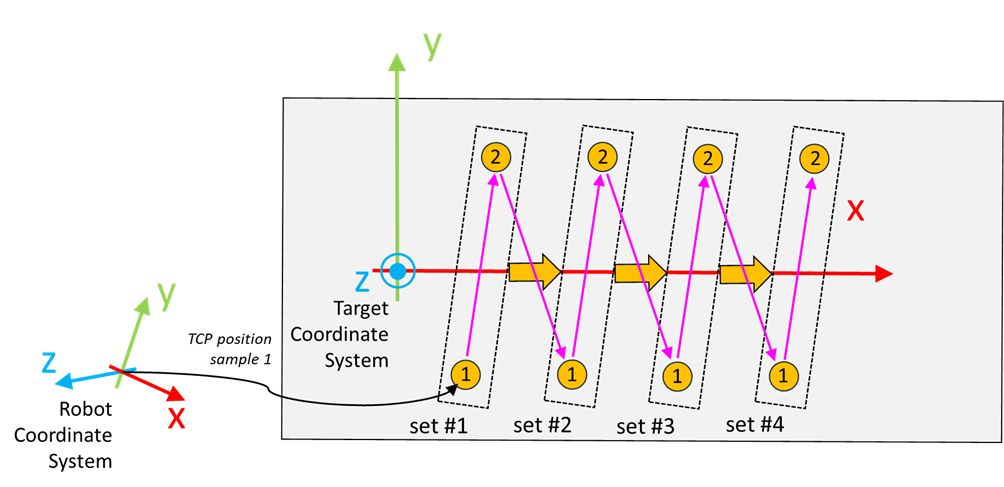
With the method AddSample(...), a new sample is added to the active set. Each sample contains the TCP position at a specific target point with reference to the coordinate system of the robot.
The following graphic displays an example of the sampling order of the points. In this case, two samples per set are acquired across four different sets, for a total of eight samples.
Access: PUBLIC
Interface
|
Input |
Data type |
Description |
|---|---|---|
|
i_stTCPPosition |
SE_MATH.ST_Vector3D |
Cartesian position of the TCP referred to the coordinate system of the robot. |
|
Output |
Data type |
Description |
|---|---|---|
|
q_xError |
BOOL |
TRUE: An error occurred during last command. For more information refer also to q_etResult and q_sResultMsg. |
|
q_etResult |
Provides diagnostic and status information. If q_xError = FALSE, then q_etResult provides status information. If q_xError = TRUE, then q_etResult provides diagnostic/error information. The enumeration ET_Result contains the possible values of the POU operation results. |
|
|
q_sResultMsg |
STRING[80] |
Provides additional information about the current status of the POU. |