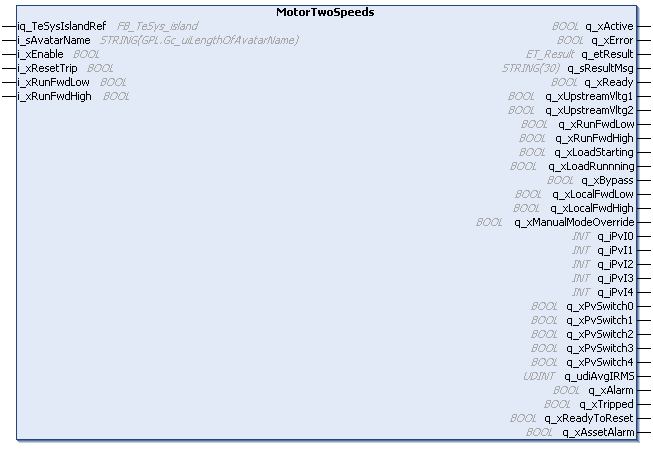
MotorTwoSpeeds - 功能描述
接口
|
输入 |
数据类型 |
描述 |
|---|---|---|
|
iq_TeSysIslandRef |
FB_TeSys_island |
TeSys island 设备引用 |
|
i_sAvatarName |
STRING(GPL.Gc_uiLengthOfAvatarName) |
对 TeSys island 配置中定义的 avatar 的引用。 |
|
i_xEnable |
BOOL |
输入 i_xEnable 的上升沿启动功能块与所选 avatar 之间的循环数据交换。只要 i_xEnable 为 TRUE,就会在每个控制器循环中交换循环数据。输入 i_xEnable 的下降沿停止数据交换。请参阅功能块在输入 i_xEnable 下的行为。 |
|
i_xResetTrip |
BOOL |
如果此输入设置为 TRUE,则 avatar 脱扣事件复位。 |
|
i_xRunFwdLow |
BOOL |
如果此输入设置为 TRUE,则电机以低速正向启动。 |
|
i_xRunFwdHigh |
BOOL |
如果此输入设置为 TRUE,则电机以高速正向启动。 |
|
输出 |
数据类型 |
描述 |
|---|---|---|
|
q_xActive |
BOOL |
如果此功能块活动,则该输出设置为 TRUE。 |
|
q_xError |
BOOL |
如果此输出设置为 TRUE,则检测到错误。有关详细信息,请参阅 q_etResult和 q_etResultMsg。 |
|
q_etResult |
ET_Result |
以数字值的形式提供诊断和状态信息。 |
|
q_sResultMsg |
STRING[30] |
以文本消息的形式提供附加的诊断和状态信息。 |
|
q_xReady |
BOOL |
如果 avatar 已准备好接收命令,则为 TRUE。 |
|
q_xUpstreamVltg1 |
BOOL |
如果此输出设置为 TRUE,则 avatar 检测到存在第一个设备的上游主电源(断路器已合闸)。 |
|
q_xUpstreamVltg2 |
BOOL |
如果此输出设置为 TRUE,则 avatar 检测到存在第二个设备的上游主电源。 |
|
q_xRunFwdLow |
BOOL |
如果此输出设置为 TRUE,则电机正低速正向运行。 |
|
q_xRunFwdHigh |
BOOL |
如果此输出设置为 TRUE,则电机正高速正向运行。 |
|
q_xLoadStarting |
BOOL |
如果此输出设置为 TRUE,则电机处于启动阶段。 |
|
q_xLoadRunning |
BOOL |
如果此输出设置为 TRUE,则 Run 或 Close 命令已被执行,且电极中正有电流流动(相当于电机正在运行,但同样也适用于非电机 avatar)。 |
|
q_xBypass |
BOOL |
指示旁路命令状态。 |
|
q_xLocalFwdLow |
BOOL |
指示本地命令的“低速正向”状态。 |
|
q_xLocalFwdHigh |
BOOL |
指示本地命令的“高速正向”状态。 |
|
q_xManualModeOverride |
BOOL |
指示手动模式覆盖状态。 |
|
q_iPvI0 |
INT |
指示过程变量输入 0。 |
|
q_iPvI1 |
INT |
指示过程变量输入 1。 |
|
q_iPvI2 |
INT |
指示过程变量输入 2。 |
|
q_iPvI3 |
INT |
指示过程变量输入 3。 |
|
q_iPvI4 |
INT |
指示过程变量输入 4。 |
|
q_xPvSwitch0 |
BOOL |
指示过程变量开关 0。 |
|
q_xPvSwitch1 |
BOOL |
指示过程变量开关 1。 |
|
q_xPvSwitch2 |
BOOL |
指示过程变量开关 2。 |
|
q_xPvSwitch3 |
BOOL |
指示过程变量开关 3。 |
|
q_xPvSwitch4 |
BOOL |
指示过程变量开关 4。 |
|
q_udiAvgIRMS |
UDINT |
指示设备测得的寿命期平均电流。 (单位:mA) |
|
q_xAlarm |
BOOL |
如果此输出设置为 TRUE,则 avatar 已检测到保护事件。 |
|
q_xTripped |
BOOL |
如果此输出设置为 TRUE,则 avatar 已检测到保护脱扣事件。 |
|
q_xReadyToReset |
BOOL |
如果此输出设置为 TRUE,则 avatar 满足脱扣复位条件,并且可使用脱扣复位命令来复位。 |
|
q_xAssetAlarm |
BOOL |
如果此输出设置为 TRUE,则 avatar 内的电源设备或安全接口模块已达到或超过额定操作次数(根据 avatar 参数)的 90%。 |