Verhalten von IF_RobotFeedbackTracking.lrRemainingTimePathPositionEnd
IF_RobotFeedbackTracking bietet zwei Parameter für die Bewertung des Trackings:
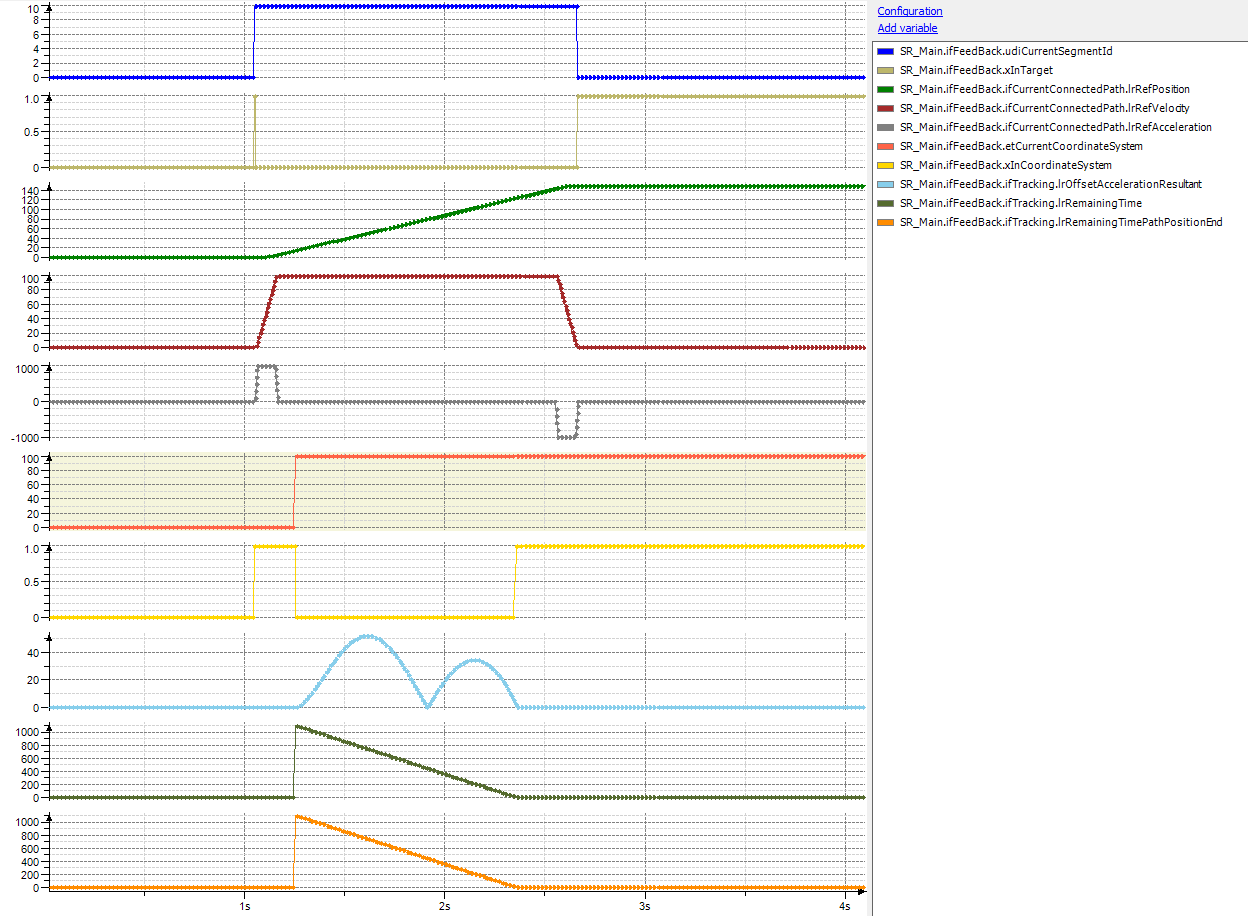
olrRemainingTime zeigt die Zeit für die Synchronphase an, die abgeschlossen werden soll.
olrRemainingTimePathPositionEnd zeigt die Zeit an, bis die verbundene Bahn die vorgegebene Endposition erreicht.
Wenn die Tracking-Beschleunigung verringert werden kann, zeigen beide Parameter denselben Wert an.
HINWEIS: Beide Werte sind berechnete LREAL-Werte, sodass ein einfacher Vergleich ifTracking.lrRemainingTime = ifTracking.lrRemainingTimePathPositionEnd nicht funktioniert.
Folgende Prüfungen sind möglich:
oABS(ifTracking.lrRemainingTime - ifTracking.lrRemainingTimePathPositionEnd) < 1.0 oder
oifTracking.lrRemainingTimePathPositionEnd ≤ ifTracking.lrRemainingTime
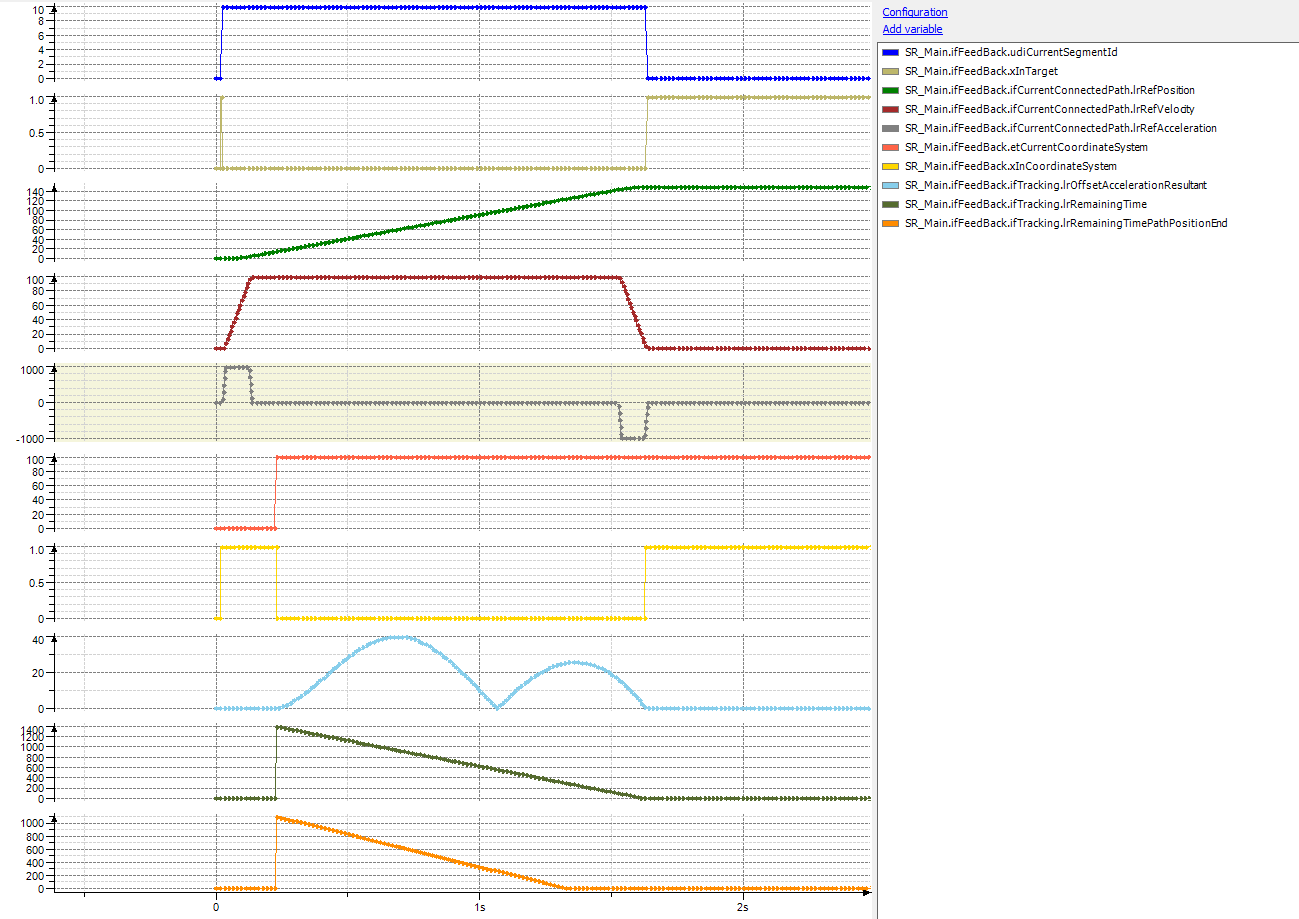
Wenn die erforderliche resultierende Beschleunigung für die Synchronphase stärker ist als die konfigurierte maximale resultierende Beschleunigung für das Tracking, dann ist lrRemaingTime größer als lrRemainingTimePathPositionEnd.
Die beiden Zeitparameter können verwendet werden, um ein Stopp-auf-Bahn früher zurückzusetzen. Bei dem vorherigen Tracking musste auf xInCoordinateSystem gewartet werden, bevor der Stopp zurückgesetzt werden konnte. Jetzt könnte der Code folgendermaßen aussehen:
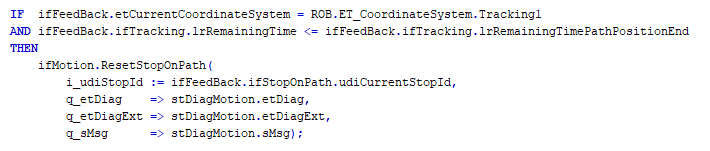
Zurücksetzen eines Stopp-auf-Bahn basierend auf den verbleibenden Zeiten
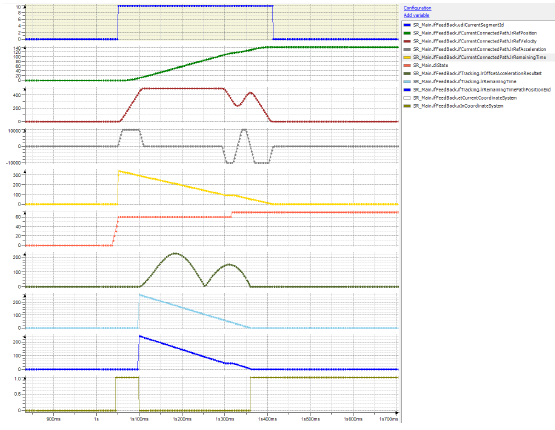
Die erforderliche Beschleunigung ist hierbei stärker als die angegebene maximale Beschleunigung. Folglich beträgt die erforderliche Zeit für die Synchronisation ca. 260 ms, während die lrRemainingTimePathPositionEnd nur 245 ms beträgt.
Folglich wird der Stopp-auf-Bahn nicht zurückgesetzt und wird wirksam (die Geschwindigkeit des Roboters ist leicht verringert). Aus diesem Grund erhöht sich die verbleibende Zeit bis zur Bahnposition Ende. Sobald die Zeit größer als die verbleibende Zeit der Synchronisation ist, wird der Stopp-auf-Bahn zurückgesetzt, ohne dass ein vollständiger Stopp des Roboters erzwungen wird.