Änderung der SCARA-Armkonfiguration
Übersicht
Das Ändern der Armkonfiguration eines SCARA mit identischen Start- und Endpositionen kann zu starken Beschleunigungen auf Achse B führen. Dieser Effekt wird verstärkt, wenn die Länge von Verbindung A der Länge von Verbindung B entspricht. Legen Sie ein Zwischenziel fest, um eine geradlinige ein- und ausgehende Bewegung des TCP zu vermeiden. Verbinden Sie die Bewegungsbefehle mit dem Zwischenziel und der gewünschten Endposition mit einer Überschleifzone, um einen nahtlosen Übergang ohne Stopp des Roboters zu erreichen.
Beschreibung des Beispiels
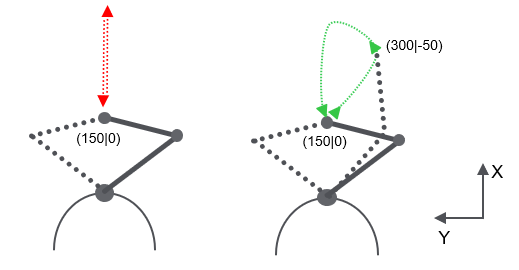
Startposition: X = 150, Y = 0 , ArmConfiguration beim Start = Rechts
stViaPoint.lrX := 300.0;
stViaPoint.lrY := -50.0;
stTarget.lrX := 150.0;
stTarget.lrY := 0.0;
MoveJ(i_stTarget := stViaPoint,
i_etArmConfiguration := ET_ArmConfiguration.Right,
i_lrMaxZone := 50.0,
i_udiSegmentId := 10);
MoveJ(i_stTarget := stTarget,
i_etArmConfiguration := ET_ArmConfiguration.Left,
i_lrMaxZone := 0.0,
i_udiSegmentId := 20);