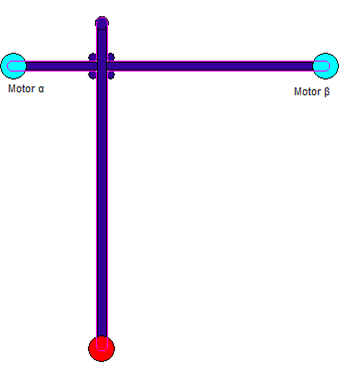
T-Gantry System with Stationary Axes
This kinematic system is similar to H-gantry systems. The drives here are also mounted stationary and the tool holder is moved by means of a belt.
The transformations that are executed by the POUs SMC_TRAFO_GantryT2 and SMC_TRAFOF_GantryT2 are designed for the following drive constellations.
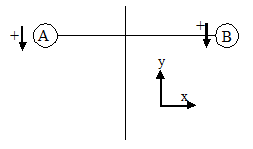
Please note that a special homing is necessary for this transformation.
If you execute a movement in the X direction, then you must move the A and B drives at the same velocity. If you execute a purely Y movement, then the drives must rotate in opposite directions. If the drive finds the homing position, then the X and Y values calculated from the forward transformation POU are used as the offset (dOffsetX and dOffsetY).
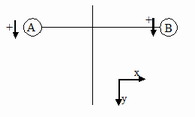
The SMC_TRAFO_GantryT2_O and SMC_TRAFOF_GantryT2_O function blocks execute the same calculation with the following constellation:
See also