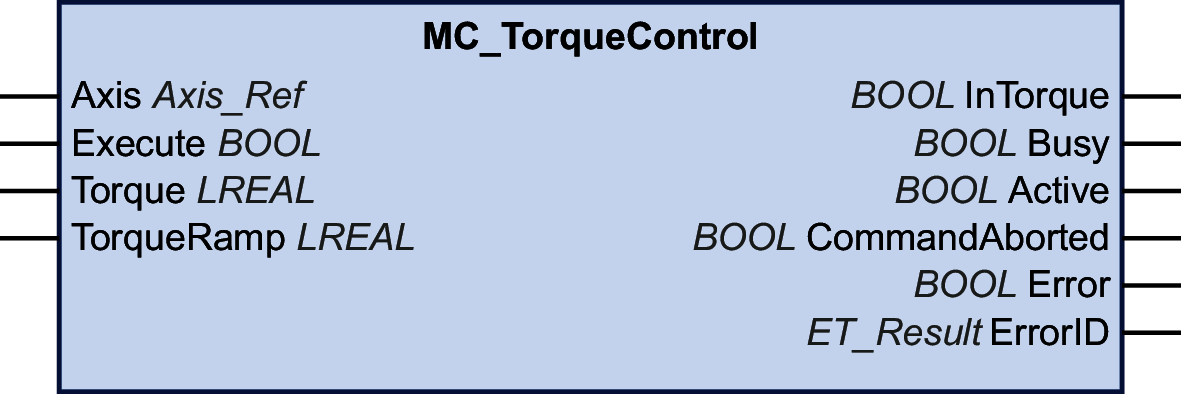
MC_TorqueControl
Descrizione funzionale
Questo blocco funzione consente di utilizzare un azionamento nel modo operativo Cyclic Synchronous Torque (CST).
Nel modo operativo Cyclic Synchronous Torque, i movimenti vengono effettuati con una coppia di destinazione specificata. La coppia di destinazione in N m è fornita tramite l'ingresso Torque. L'intervallo di coppia consentito in questo ingresso è da -30 volte la coppia di stallo continua (M_M_0_) a +30 volte la coppia di stallo continua del motore collegato all'azionamento. I valori negativi avviano un movimento nella direzione negativa del movimento.
La coppia di stallo continua è un valore specifico del motore. Durante l'avvio di fase (transizione alla Fase di comunicazione 2), il sistema determina il valore della coppia di stallo continua tramite il parametro P-3013-0-22. Quando si avvia il blocco funzione (il valore all'ingresso Execute è impostato a TRUE), il sistema verifica che il valore di coppia all'ingresso Torque sia valido.
L'ingresso TorqueRamp consente di specificare una rampa di coppia in N m/s. Se il valore all'ingresso TorqueRamp è 0, la coppia specificata tramite l'ingresso Torque viene generata immediatamente senza una rampa di coppia.
L'uscita InTorque viene impostata a TRUE una volta raggiunta la coppia di destinazione specificata.
Il blocco funzione può essere avviato quando l'asse è nello stato operativo StandStill.
Se il modo operativo richiesto non viene confermato dall'azionamento entro 30 cicli Sercos, viene rilevato un errore (uscita Error del blocco funzione richiedente impostata a TRUE).
Ingressi
|
Ingresso |
Tipo di dati |
Descrizione |
|---|---|---|
|
Axis |
Axis_Ref |
Riferimento all'asse per cui deve essere eseguito il blocco funzione. |
|
Execute |
BOOL |
Campo valori: FALSE, TRUE. Valore predefinito: FALSE. Un fronte di salita dell'ingresso Execute avvia il blocco funzione. Il blocco funzione continua a essere eseguito e l'uscita Busy è impostata a TRUE. È possibile riavviare questo blocco funzione durante l'esecuzione. I valori di destinazione vengono sovrascritti dai nuovi valori nel momento in cui si verifica il fronte di salita. |
|
Torque |
LREAL |
Coppia di destinazione per il modo operativo Cyclic Synchronous Torque in N m Campo valori: un valore LREAL positivo Intervallo di valori: da -30 * coppia di stallo continua (M_M_0_) a +30 * coppia di stallo continua (M_M_0_) del motore collegato I valori negativi attivano un movimento in direzione negativa, i valori positivi un movimento nella direzione positiva del movimento. Valore predefinito: 0 |
|
TorqueRamp |
LREAL |
Rampa di coppia per il modo operativo Cyclic Synchronous Torque in N m/s. Se l'ingresso è impostato a 0, la coppia di destinazione specificata tramite l'ingresso Torque viene generata immediatamente senza una rampa di coppia. Campo valori: un valore LREAL positivo Valore predefinito: 0 |
Uscite
|
Uscita |
Tipo di dati |
Descrizione |
|---|---|---|
|
InTorque |
BOOL |
Questa uscita indica se la coppia target specificata è stata raggiunta.
Campo valori: FALSE, TRUE. Valore predefinito: FALSE.
|
|
Busy |
BOOL |
Campo valori: FALSE, TRUE. Valore predefinito: FALSE.
|
|
Active |
BOOL |
Campo valori: FALSE, TRUE. Valore predefinito: FALSE.
|
|
CommandAborted |
BOOL |
Campo valori: FALSE, TRUE. Valore predefinito: FALSE.
|
|
Error |
BOOL |
Campo valori: FALSE, TRUE. Valore predefinito: FALSE.
|
|
ErrorID |
Questa enumerazione fornisce informazioni diagnostiche. |
Nel modo operativo Cyclic Synchronous Torque, l'azionamento può essere nello stato operativo PLCopen Standstill. In questo stato operativo, la coppia target è 0 N m. Quando la coppia è 0 N m, i movimenti sono possibili, ad esempio a causa di forze esterne. Non vi è monitoraggio dell'arresto fisico del motore.
| AVVERTIMENTO | |
|---|---|
Note
La casella di controllo TorqueOperationMode nella scheda Configurazione delle funzionalità deve essere selezionata per attivare il modo operativo Cyclic Synchronous Torque.
Nel caso di azionamenti LMX28S, è possibile utilizzare il modo operativo Cyclic Synchronous Torque o il modo operativo Cyclic Synchronous Velocity (i modi operativi non sono disponibili contemporaneamente). Selezionare solo una delle due caselle.
È possibile utilizzare il blocco funzione MC_ReadActualTorque per leggere il valore di coppia.