Verhalten mit Armkonfiguration InnerRight / InnerLeft
Bei ET_ArmConfiguration.Right und ET_ArmConfiguration.Left ist der Arbeitsbereich von AxisB eines SCARA (Selective Compliance Assembly Robot Arm), der mit der Methode IF_RobotConfiguration - Scara4Ax konfiguriert wurde, auf den Bereich ±180° begrenzt, wobei 0° die ausgestreckte Position markiert. Deshalb ist eine Änderung der Armkonfiguration von rechts (Winkel von AxisB ≥ 0°) nach links (Winkel von AxisB < 0°) und umgekehrt nur möglich, wenn eine Bewegung durch die ausgestreckte Position angewandt wird.
Bei ET_ArmConfiguration.InnerRight und ET_ArmConfiguration.InnerLeft ist der Arbeitsbereich von AxisB eines SCARA, der mit der Methode IF_RobotConfiguration - Scara4Ax konfiguriert wurde, nicht auf die Bewegung durch die ausgestreckte Position beschränkt. Das bedeutet, dass eine Änderung der Armkonfiguration von rechts (Winkel von AxisB ≥ 0°) nach links (Winkel von AxisB < 0°) und umgekehrt auch möglich ist, wenn eine Bewegung durch die zusammengeklappte Position angewandt wird.
Die zusammengeklappte Position stellt einen Winkel von + oder – 180° von AxisB dar.
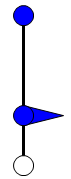
Beispiele (Ausgestreckte Position)
Wenn sich ein Roboter exakt in der ausgestreckten Position befindet, kann er unverzüglich die Zielarmkonfiguration der nächsten Bewegung übernehmen. Daher wird davon ausgegangen, dass die kürzeste Bewegung von AxisB immer die neue Zielposition erreicht.
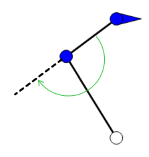
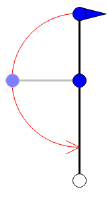
Beispiel 1:
oStartposition: Ausgestreckt (AxisB = 0°)
oStartarmkonfiguration: Right oder Left
oZielarmkonfiguration: Right oder InnerRight
Die Zielarmkonfigurationen Right und InnerRight führen beide zu einer Drehung von AxisB gegen den Uhrzeigersinn.
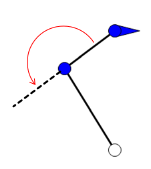
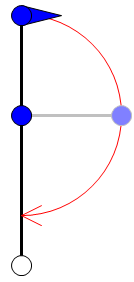
Beispiel 2:
oStartposition: Ausgestreckt (AxisB = 0°)
oStartarmkonfiguration: Right oder Left
oZielarmkonfiguration: Left oder InnerLeft
Die Zielarmkonfigurationen Left und InnerLeft führen beide zu einer Drehung von AxisB im Uhrzeigersinn.
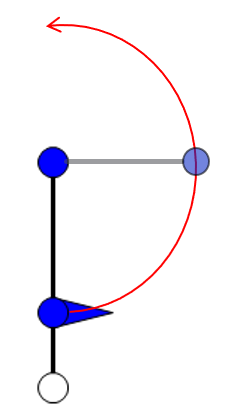
Beispiele (Zusammengeklappte Position)
Das gleiche Verhalten gilt für die zusammengeklappte Position. Wenn sich ein Roboter exakt in der zusammengeklappten Position befindet, kann er unverzüglich die Zielarmkonfiguration der nächsten Bewegung übernehmen. Daher wird davon ausgegangen, dass die kürzeste Bewegung von AxisB immer die neue Zielposition erreicht.
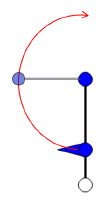
Beispiel 1:
oStartposition: Zusammengeklappt (AxisB = 180° oder -180°)
oStartarmkonfiguration: Right oder Left
oZielarmkonfiguration: Right oder InnerRight
Die Zielarmkonfigurationen Right und InnerRight führen beide zu einer Drehung von AxisB im Uhrzeigersinn.
Beispiel 2:
oStartposition: Zusammengeklappt (AxisB = 180° oder -180°)
oStartarmkonfiguration: Right oder Left
oZielarmkonfiguration: Left oder InnerLeft
Die Zielarmkonfigurationen Left und InnerLeft führen beide zu einer Drehung von AxisB gegen den Uhrzeigersinn.