Roboteraufruf in Ihrem Programm
Sie müssen den Roboter in Ihrem Projekt aufrufen.
|
Schritt |
Aktion |
|---|---|
|
1 |
Kopieren Sie die Code-Snippets der gleichnamigen Registerkarte (siehe Roboter-Explorer) an den gewünschten Ort in Ihrem Anwendungscode. 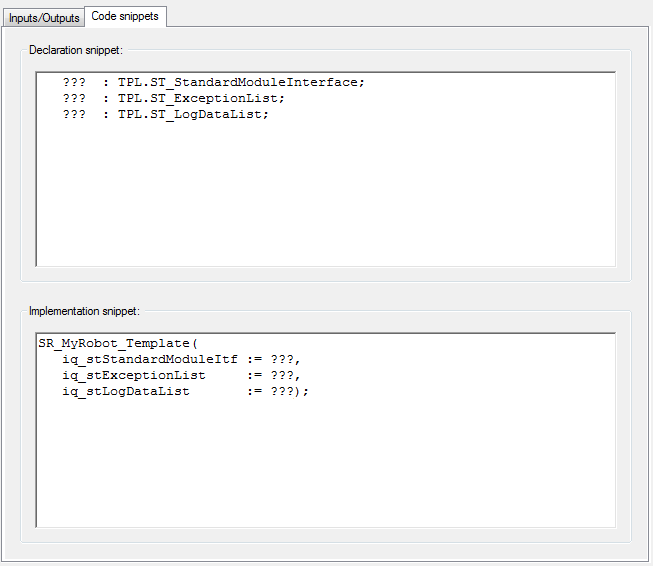
|
|
2 |
Wenn Sie ein PacDrive 3 Template verwenden, befindet sich dieses üblicherweise im Inneren von SubModules_Action (von SR_MainMachine oder einem äquivalenten Element in einem Knotenmodul), das in der Regel die Sprache FBD verwendet. Zur Verwendung der Code-Snippets von Konfigurationsdaten können Sie das Eingabefeld EXECUTE (Ausführen) verwenden, um den Code in Form von strukturiertem Text hinzuzufügen. 
|
|
3 |
Fügen Sie die für die Anwendung spezifischen In-Out-Variablen hinzu. Die verwendeten Variablen sind nur ein Beispiel. |
|
Schritt |
Aktion |
|---|---|
|
1 |
Kopieren Sie die Code-Snippets der gleichnamigen Registerkarte (siehe Roboter-Explorer) an den gewünschten Ort in Ihrem Anwendungscode. 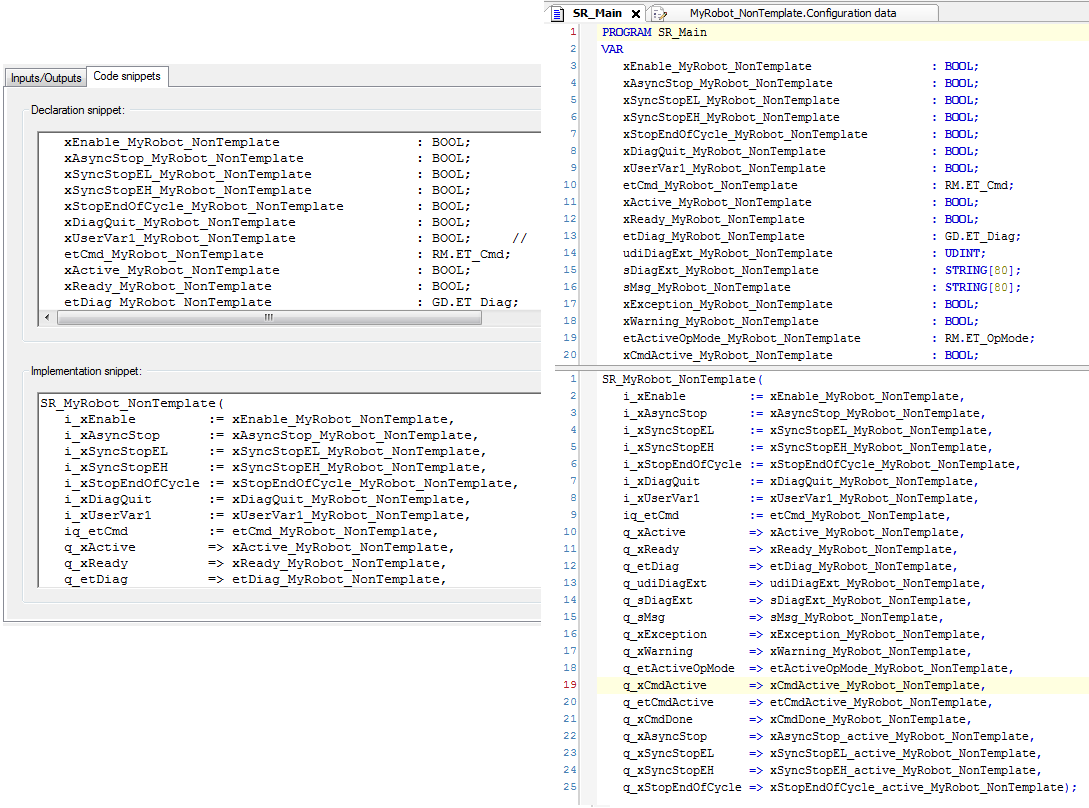
|
HINWEIS: Das Dialogfeld Roboter hinzufügen... für Objekte vom Robotertyp Non Template bietet die Option Baustein-Instanz erzeugen.
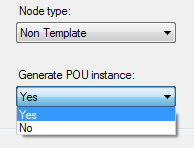
Wenn Sie für diese Option Ja wählen, erzeugt das System den Programmaufruf und den Aufruf der entsprechenden Aufgabenstellung. Siehe Option zur Codeerzeugung für Non Template-Roboter.
HINWEIS: Wenn Sie VAR_INPUT, VAR_OUTPUT oder VAR_INPUT_OUTPUT zum ModuleInterface hinzufügen, müssen Sie den Aufruf des Roboters aktualisieren (siehe Beispiel in Abgleich).