Behavior of IF_RobotFeedbackTracking.lrRemainingTimePathPositionEnd
IF_RobotFeedbackTracking provides two parameters you can use to evaluate the tracking:
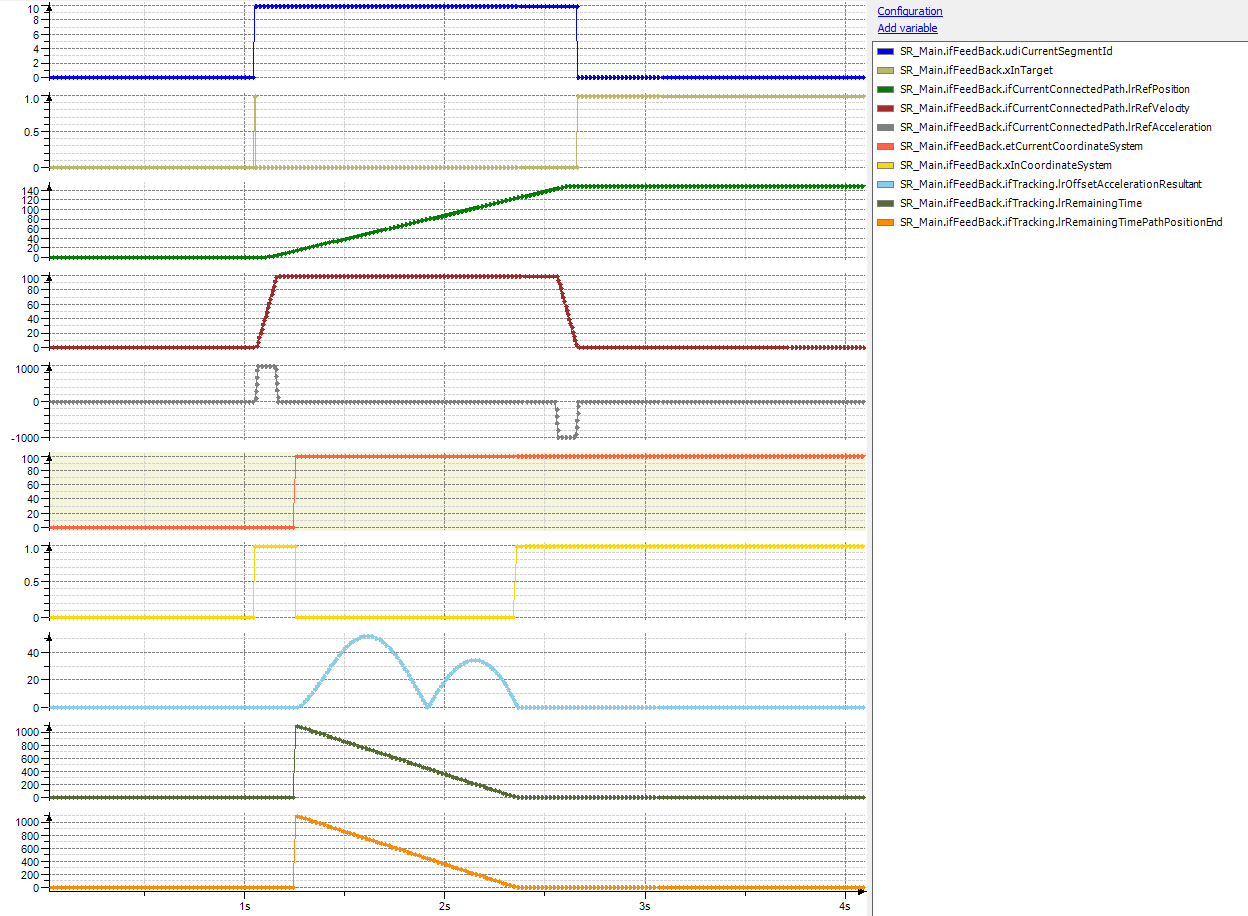
olrRemainingTime displays the time for the synchronization phase to be finished.
olrRemainingTimePathPositionEnd displays the time until the connected path will reach the specified end position.
In case the tracking acceleration can be reduced, both parameters display the same value.
NOTE: Both values are calculated LREAL values and so a simple comparison ifTracking.lrRemainingTime = ifTracking.lrRemainingTimePathPositionEnd does not work.
Possible verifications are:
oABS(ifTracking.lrRemainingTime - ifTracking.lrRemainingTimePathPositionEnd) < 1.0 or
oifTracking.lrRemainingTimePathPositionEnd ≤ ifTracking.lrRemainingTime
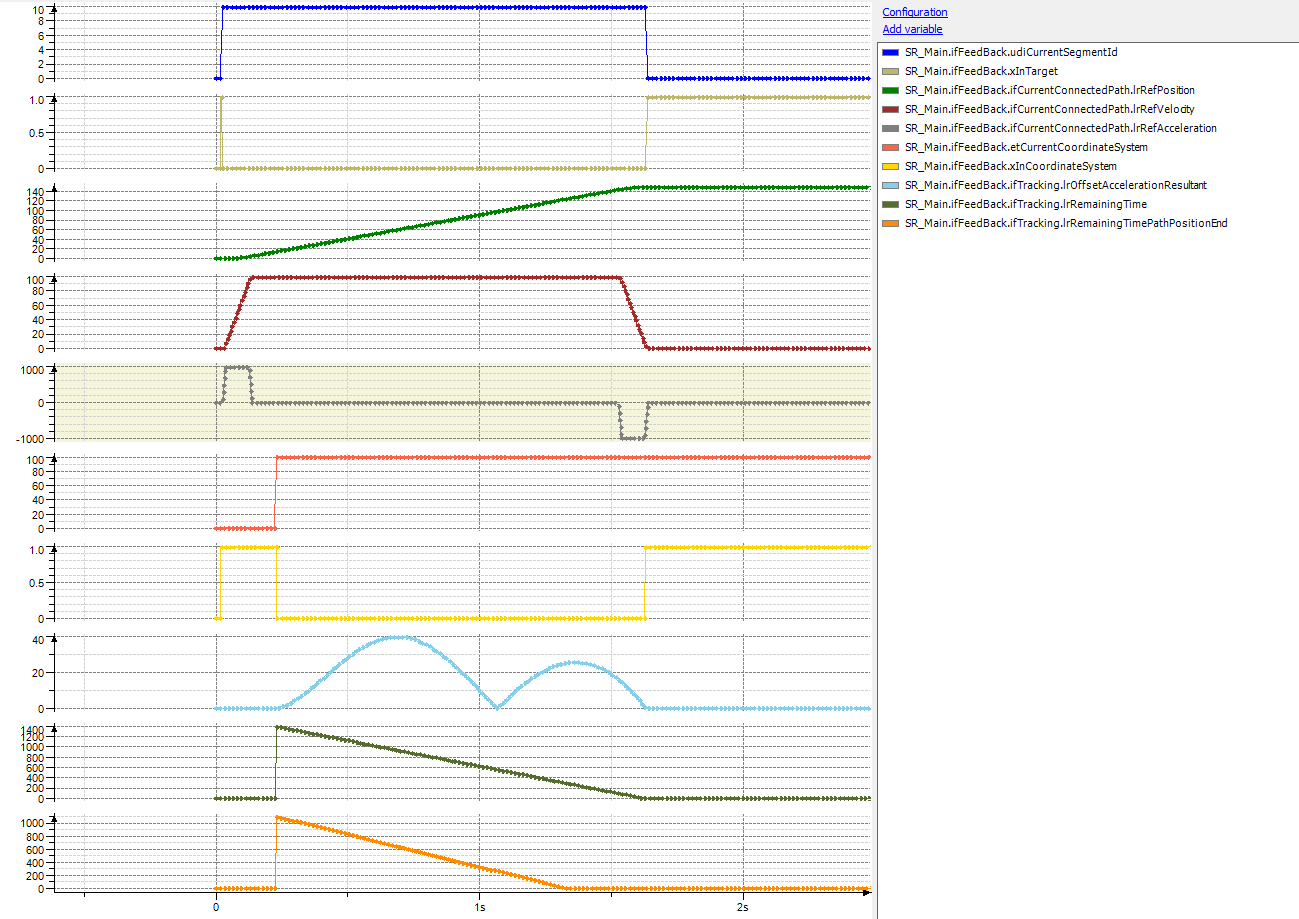
When the necessary resulting acceleration for the synchronization phase is higher than the configured maximum resulting acceleration for tracking, lrRemaingTime is greater than lrRemainingTimePathPositionEnd.
You can use the two time parameters to reset a stop on path earlier. With the former tracking, you had to wait for xInCoordinateSystem before you reset the stop, now your code could be like this:
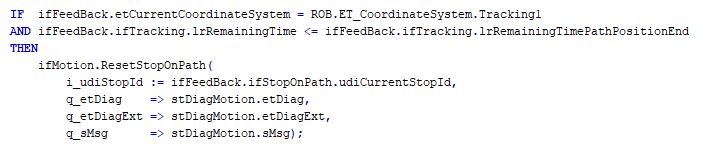
Reset stop-on-path based on remaining times
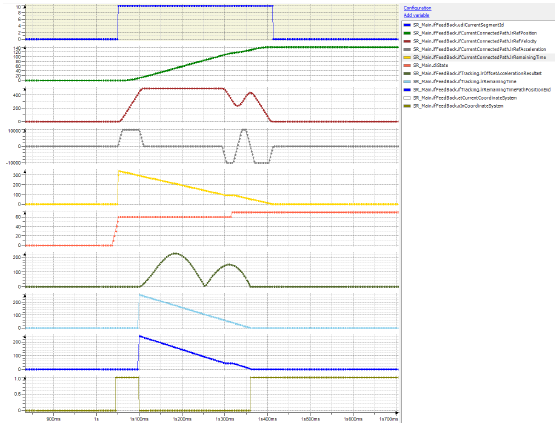
Here, the necessary acceleration is greater than the given maximum acceleration. As a result, the necessary time for the synchronization is approximately 260 ms, while lrRemainingTimePathPositionEnd is only 245 ms.
As a result, the stop-on-path is not reset and becomes effective (the velocity of the robot shows a slight dip). Because of this, the remaining time until path position end increases. As soon as the time is greater than the remaining time of the synchronization, the stop-on-path is reset without forcing the robot into a complete stop.