White States are transition states.
For example, during the execution of a command already sent.
Dependent on the execution time, it can be possible that these states do not appear in the monitoring.
Gray States are final states.
For example, a sent command is executed successfully.
The module is waiting for a next command to be sent.
General OpMode diagram
Specific OpMode diagrams
oOpMode diagram - BrakeRelease
White States are transition states.
For example, a sent command is being executed.
Dependent on the execution time, it can be possible that these states do not appear in the monitoring.
Gray States are final states.
For example, a sent command is executed successfully.
The module is waiting for a next command to be sent.
NOTE: The command ET_Cmd.Abort can be sent at any time and in every state.
ET_Cmd.Abort leads to the state ET_State.BrakeExit.
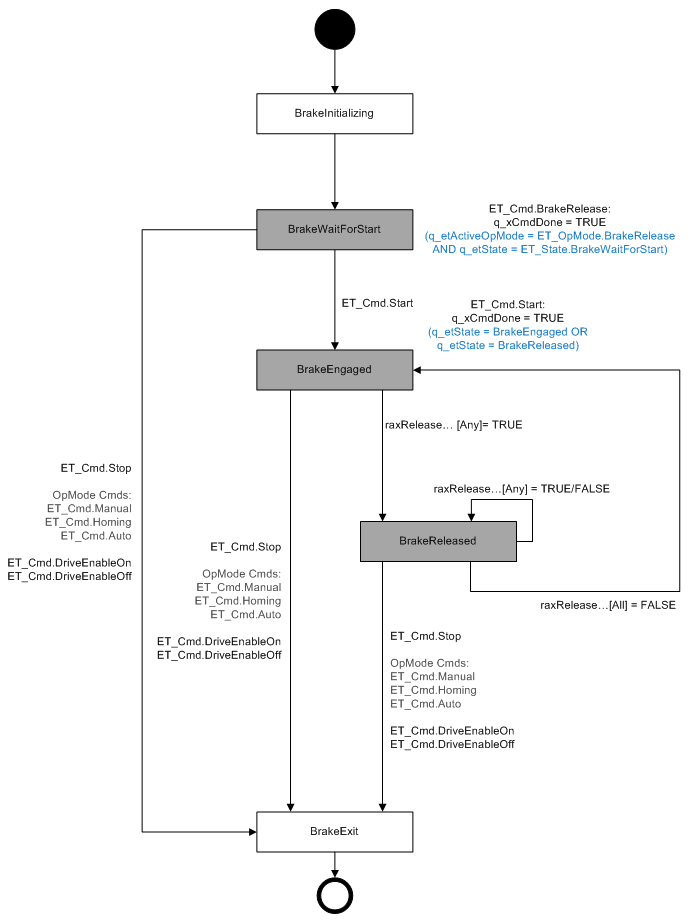
Stop behavior
The commands with the target state ET_State.BrakeExit engages the released brakes.
Release brakes simultaneous
It is only possible to release all brakes simultaneously or at least the brakes of axis C and axis D at the same time. Whenever the brakes of the SCARA are released, the yellow indicator illuminates.
Also refer to ReleaseAxisInvalid.
OpMode BrakeRelease with additional circuit
If the additional circuit is configured, the OpMode BrakeRelease presents a different behavior. This OpMode also takes into account the opening and closing of the contactors.
In state BrakeWaitUntilContactorOpen or BrakeWaitUntilContactorClosed, the contactors are monitored. If, after a timeout (100 ms), one of the contactors does not respond, an exception including a SyncStopEL is sent to the exception list.
Also refer to ReleaseAxisInvalid and ContactorNotResponding.
The OpMode BrakeReleaseButton is entered once the push button on the robot is pressed. This mode can only be terminated by releasing the button. If the button is pressed, any other command is refused and an AsyncStop exception (stExceptionCmdImpossibleOverwrite) is sent.
The OpMode BrakeReleaseButton can only be entered via pressing the push button.
If the push button is not pressed and the command ET_Cmd.BreakereleaseButton is sent, an AsyncStop exception (stExceptionCmdUnknown) is sent.
OpMode BrakeReleaseButton without additional circuit
Whenever the brake release button is pressed, an exception including a SyncStopEL is sent. This exception forces the main machine to leave its present OpMode.
Also refer to BrakeReleaseButtonPressed.
OpMode BrakeReleaseButton with additional circuit
Whenever the brake release button is pressed an exception including a SyncStopEL is sent. This exception forces the main machine to leave its present OpMode.
In state BrakeWaitUntilContactorOpen or BrakeWaitUntilContactorClosed, the contactors are monitored. If, after a timeout (100 ms), one of the contactors does not respond, an exception including a SyncStopEL is sent to the exception list.
Beside the timeouts of OpMode BrakeReleaseButton, the correct behavior of the contactors is monitored by the RoboticModule. Invalid states lead to a SyncStopEL exception and prevent the axis from switching into position control. These exceptions can only be deleted from the exception list once the correct state of the contactors is reestablished.
Whenever the brakes of the Lexium S Robot are released, the yellow indicator illuminates.
Also refer to BrakeReleaseButtonPressed and ContactorNotResponding.
White States are transition states.
For example, a sent command is being executed.
Dependent on the execution time, it can be possible that these states do not appear in the monitoring.
Gray States are final states.
For example, a sent command is executed successfully.
The module is waiting for a next command to be sent.
NOTE: The command ET_Cmd.Abort can be sent at any time and in every state.
ET_Cmd.Abort leads to the state ET_State.HomingExit.
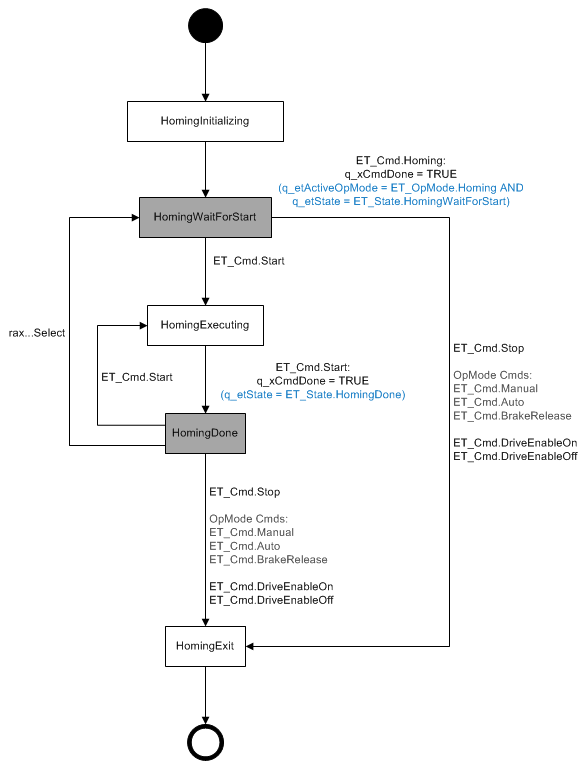
Stop behavior
ET_Cmd.Abort - An active homing motion is stopped with a ControllerStop.
All other commands with the target state ET_State.HomingExit can be send only if no homing is active.
White States are transition states.
For example, a sent command is being executed.
Dependent on the execution time, it can be possible that these states do not appear in the monitoring.
Gray States are final states.
For example, a sent command is executed successfully.
The module is waiting for a next command to be sent.
NOTE: The command ET_Cmd.Abort can be sent at any time and in every state.
ET_Cmd.Abort leads to the state ET_State.ManualExit.
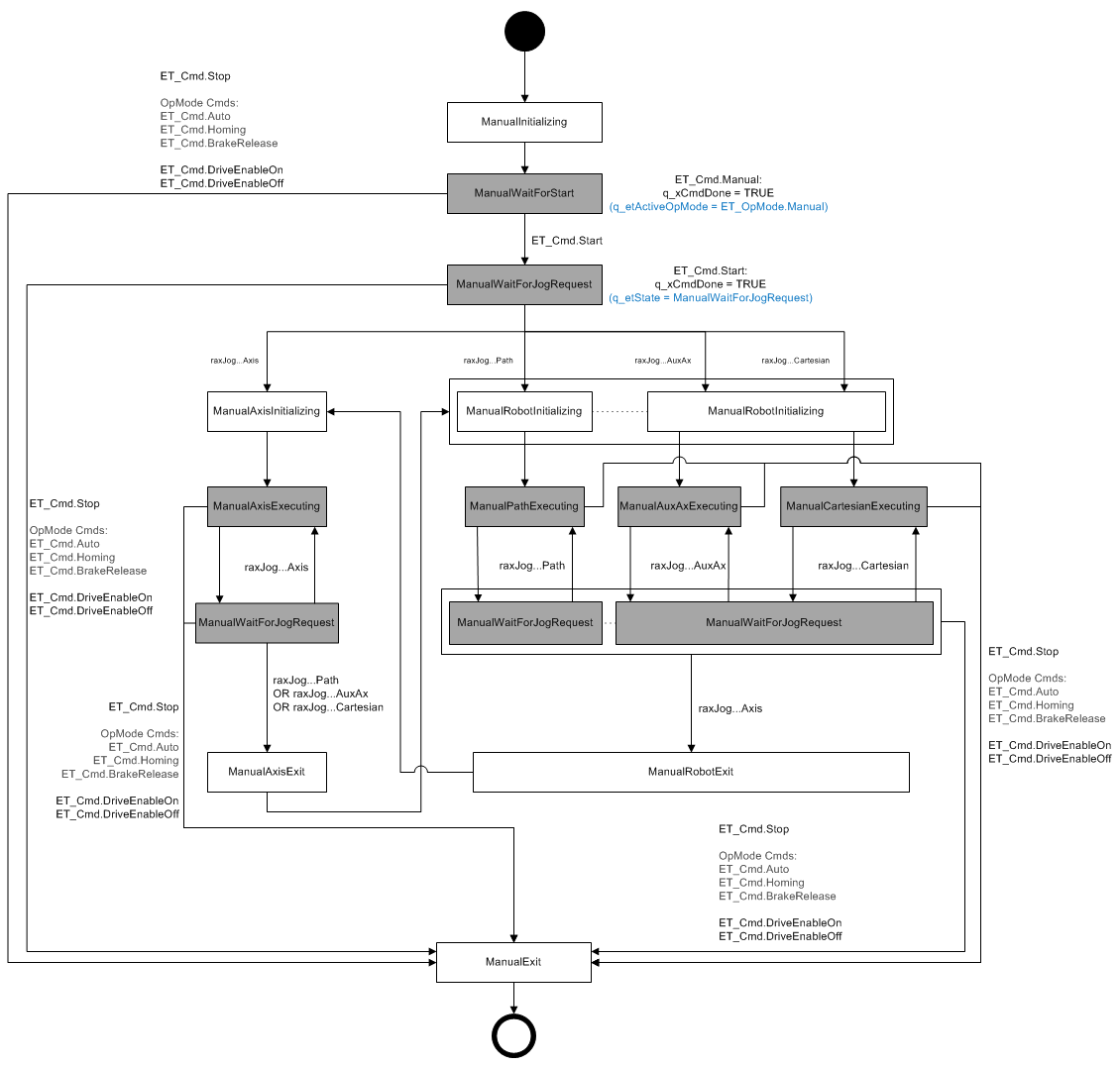
Stop behavior
ET_State.ManualAxisExecuting
Stop behavior in case of state ET_State.ManualAxisExecuting is active:
oET_Cmd.Stop - The active motion is stopped with the configured manual parameters for axes jogging.
oAll other commands with the target state ET_State.ManualExit lead to an ControllerStop of the active motion.
ET_State.ManualPathExecuting
Stop behavior in case of state ET_State.ManualPathExecuting is active:
oET_Cmd.Stop - The active motion is stopped with the configured manual parameters for path jogging set by IF_Manual.SetParameter for ROB.ET_RobotComponent.Path.
oAll other commands with the target state ET_State.ManualExit lead to a stop-on-path with the configured emergency stop parameters set by IF_Configuration.SetEmergencyParameter of the active motion.
ET_State.ManualAuxAxExecuting or ET_State.ManualCartesianExecuting
Stop behavior in case of state ET_State.ManualAuxAxExecuting or ET_State.ManualCartesianExecuting is active:
oET_Cmd.Stop - The active motion is stopped with the configured manual parameters for AuxAx jogging set by IF_Manual.SetParameter for ROB.ET_RobotComponent.AuxAx1 or Cartesian jogging set by IF_Manual.SetParameter for ROB.ET_RobotComponent.CartesianX, -Y, -Z.
oAll other commands with the target state ET_State.ManualExit lead to a stop with the configured emergency parameters set by IF_Configuration.SetEmergencyParameter of the active motion.
TPL.ET_Reaction.AsyncStop
Drives are disabled by the module. The configured ControllerEnableStopMode (drive parameter) is used for stopping.
TPL.ET_Reaction.SyncStopEL
The robot movement is stopped by using the emergency parameters set by:
oIF_Configuration.SetEmergencyParameters(…)
oIF_Configuration.SetEmergencyParameters2(…)
An active tracking is stopped with the parameter set by:
oROB.IF_RobotMotion.SetMaxAccelerationResultant(…)
When the robot movement is stopped, the drives are disabled.
TPL.ET_Reaction.SyncStopEH
The robot movement is stopped by using the emergency parameters set by:
oIF_Configuration.SetEmergencyParameters(…)
oIF_Configuration.SetEmergencyParameters2(…)
An active tracking is stopped with the parameter set by:
oROB.IF_RobotMotion.SetMaxAccelerationResultant(…)
When the robot movement is stopped, the drives are NOT disabled.
TPL.ET_Reaction.StopEndOfCycle
The robot movement is stopped by using the motion parameters set by:
oIF_Manual.SetMaxDeceleration(…)
After the robot jogging movement has stopped, an active tracking is stopped with the parameter set by:
oROB.IF_RobotMotion.SetMaxAccelerationResultant(…)
White States are transition states.
For example, a sent command is being executed.
Dependent on the execution time, it can be possible that these states do not appear in the monitoring.
Gray States are final states.
For example, a sent command is executed successfully.
The module is waiting for a next command to be sent.
NOTE: The command ET_Cmd.Abort can be sent at any time and in every state.
ET_Cmd.Abort leads to the state ET_State.AutoExit.
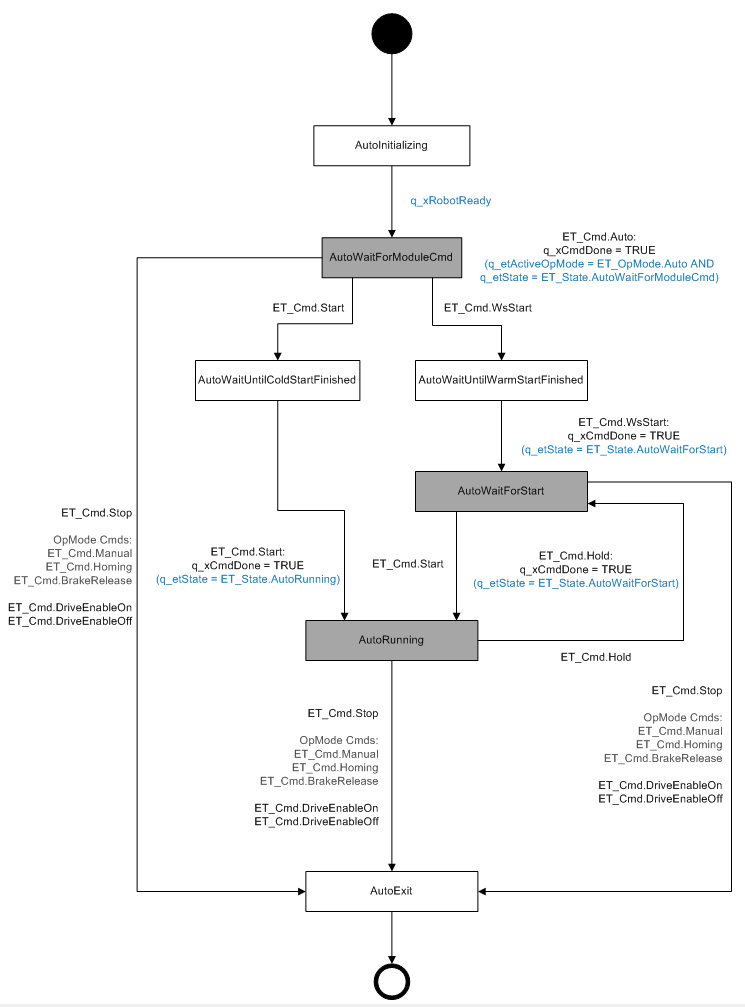
Stop behavior
ET_State.AutoRunning
Stop behavior in case of state ET_State.AutoRunning is active and the robot is in motion:
oET_Cmd.Hold - The active path motion is stopped on path with the configured motion parameters set by ROB.IF_RobotMotion.SetMotionParameter for ROB.ET_RobotComponent.Path.
oET_Cmd.Stop - The active path motion is stopped on path with the configured motion parameters set by ROB.IF_RobotMotion.SetMotionParameter for ROB.ET_RobotComponent.Path).
oAll other commands with the target state ET_State.AutoExit lead to a stop-on-path with the configured emergency parameters set by IF_Configuration.SetEmergencyParameter.
TPL.ET_Reaction.AsyncStop
Drives are disabled by the module. The configured ControllerEnableStopMode (drive parameter) is used for stopping.
TPL.ET_Reaction.SyncStopEL
The robot movement is stopped by using the emergency parameters set by:
oIF_Configuration.SetEmergencyParameters(…)
oIF_Configuration.SetEmergencyParameters2(…)
An active tracking is stopped with the parameter set by:
oROB.IF_RobotMotion.SetMaxAccelerationResultant(…)
When the robot movement is stopped, the drives are disabled.
TPL.ET_Reaction.SyncStopEH
The robot movement is stopped by using the emergency parameters set by:
oIF_Configuration.SetEmergencyParameters(…)
oIF_Configuration.SetEmergencyParameters2(…)
An active tracking is stopped with the parameter set by:
oROB.IF_RobotMotion.SetMaxAccelerationResultant(…)
When the robot movement is stopped, the drives are NOT disabled.
TPL.ET_Reaction.StopEndOfCycle
The robot path movement is stopped by using the motion parameters set by:
oROB.IF_RobotMotion.SetMotionParameter(…)
oROB.IF_RobotMotion.SetMaxDeceleration(…)
oROB.IF_RobotMotion.SetRamp(…)
After the robot path movement has stopped, an active tracking is stopped with the parameter set by: