IF_CollisionHandlerDelta3Ax – EvaluateDirectKinematics - (Methode)
Überblick
|
Typ: |
Methode |
|
Verfügbar ab: |
V1.0.0.0 |
Dieses Kapitel enthält Informationen zu folgenden Aspekten:
-
Rückgabewert
Beschreibung
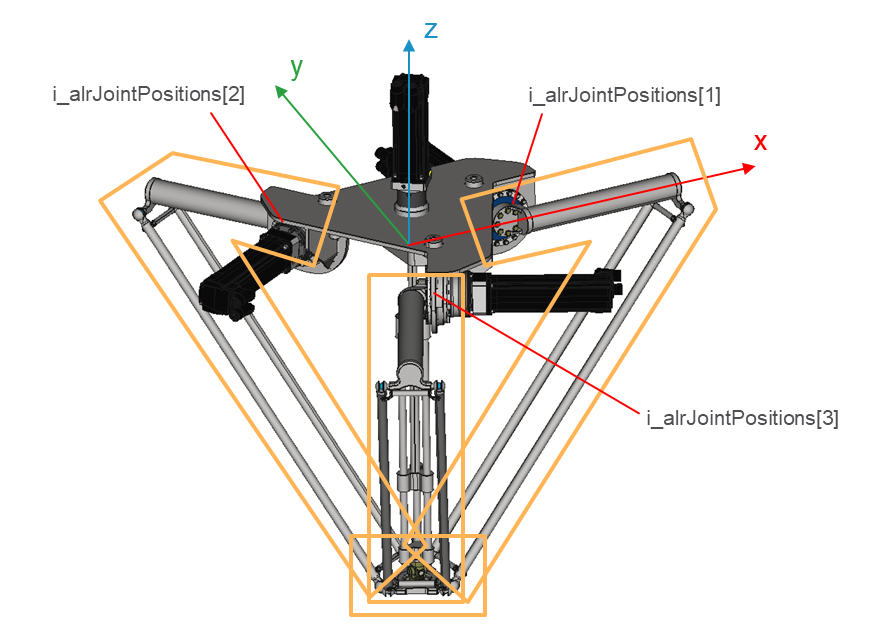
Ausgehend von den Gelenkpositionen prüft diese Methode die Lösung der direkten Kinematik und gibt die kartesische Position der Zwischenpunkte in der kartesischen Struktur zurück.
Die folgende Grafik zeigt die Elemente von i_alrJointPositions.
Schnittstelle
Zugriff: PUBLIC
|
Eingang |
Datentyp |
Beschreibung |
|---|---|---|
|
i_alrJointPositions |
ARRAY [1...Gc_udiDelta3AxNumberOfJoints] OF LREAL |
Gelenkpositionen eines Delta3Ax-Roboters. |
|
Ausgang |
Datentyp |
Beschreibung |
|---|---|---|
|
q_xError |
BOOL |
Der Ausgang wird auf TRUE gesetzt, wenn bei der Ausführung ein Fehler erkannt wurde. |
|
q_etResult |
POU-spezifischer Ausgang der Diagnose. q_xError = FALSE -> Statusmeldung. q_xError = TRUE -> Diagnosemeldung. |
|
|
q_sResultMsg |
STRING(80) |
Ereignisabhängige Meldung, die zusätzliche Informationen über den Diagnosezustand gibt. |
|
q_stResultLocal |
Ergebnis der Kinematik, mit Bezug auf das lokale Koordinatensystem des Roboters. Das Ergebnis kann als Eingang von UpdateFromKinematicsResult bereitgestellt werden. |
|
|
q_stResultGlobal |
Ergebnis der Kinematik, mit Bezug auf ein globales Koordinatensystem. Dies wird auf der Grundlage der konfigurierten Werte der Basisposition und -ausrichtung ermittelt. |