Betriebsart
Überblick
Weitere Informationen zur Anzeige der verschiedenen Registerkarten finden Sie im Benutzerhandbuch der Smart Template-Module.
Die Registerkarte enthält auf der linken Seite eine Registerkarte für jede Betriebsart.
Auf der rechten Seite zeigt die Registerkarte eine Visualisierung des Roboters an. Die Visualisierung kann konfiguriert werden ( und ).
Registerkarte „Manual“
-
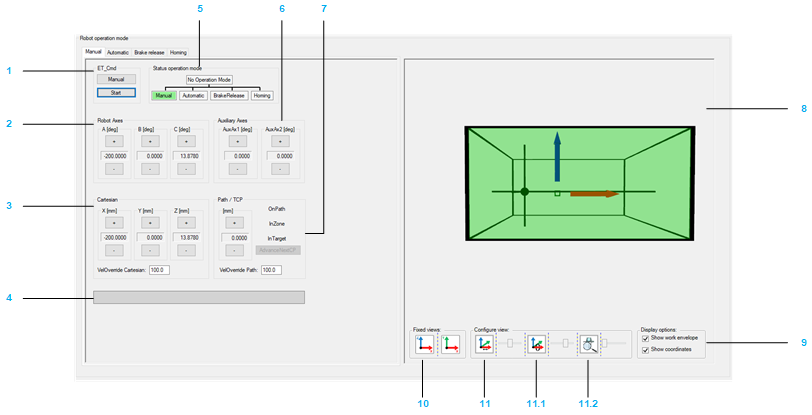
Die linke Seite der Registerkarte unterstützt Sie bei der manuellen Bewegung des Roboters.
-
Auf der rechten Seite der Registerkarte werden die Roboterbewegungen angezeigt. Die Visualisierung kann konfiguriert werden ( und ).
| WARNUNG | |
|---|---|
Manuelle Bewegung des Roboters:
|
Position |
Beschreibung |
|---|---|
|
1 |
Wenn sich das Modul nicht in der Betriebsart befindet, klicken Sie auf die Schaltfläche , um den Befehl RM.ET_Cmd.Manual zu senden, und klicken Sie anschließend auf die Schaltfläche , um den Befehl RM.ET_Cmd.Start zu senden.
HINWEIS: Sie können die Befehle auch über das ModuleInterface (z. B. iq_etCmd) senden.
Welche kartesischen Parameter angezeigt werden, ist von der Konfiguration von abhängig (siehe das Robotic-Bibliothekshandbuch). Wenn die Betriebsart akzeptiert wird, wechselt die Hintergrundfarbe des Betriebsartstatus zu grün. |
|
2 |
Klicken Sie auf die Schaltflächen (positiv / negativ), um sich entlang der Roboterachsen durch Steuerung der entsprechenden Antriebe zu bewegen (tippen). |
|
3 |
Klicken Sie auf die Schaltflächen (positiv / negativ), um den TCP entlang der Achsen des kartesischen Koordinatensystems zu bewegen (tippen). Welche kartesischen Parameter angezeigt werden, ist von der Konfiguration von ET_WorkingPlane (siehe das Robotic-Bibliothekshandbuch) abhängig. : Proportionale Auswirkung auf die aktive kartesische Tippgeschwindigkeit. Einheit: % |
|
4 |
Anzeige der anhängigen Hardware- und Softwarebegrenzungen. |
|
5 |
Zeigt die Betriebsart des Moduls an. Wenn sich der Roboter in der Betriebsart befindet, können Sie den Roboter schrittweise mittels der Schaltflächen der verschiedenen Tippbetriebsarten bewegen:
|
|
6 |
Klicken Sie auf die Schaltflächen (positiv / negativ), um die Hilfsachsen (Auxiliary Axes) zu bewegen (tippen).
HINWEIS: Die Schaltflächen werden nur angezeigt, wenn Hilfsachsen konfiguriert wurden.
|
|
7 |
Klicken Sie auf die Schaltflächen (positiv / negativ), um den TCP entlang einer verbundenen Bahn (wenn eine verbundene Bahn vorhanden ist) zu bewegen (tippen). Statusinformationen zur TCP-Bewegungen finden Sie in den Rückmeldungseigenschaften xOnPath, xInZone und xInTarget (siehe das Robotic-Bibliothekshandbuch). : Proportionale Auswirkung auf Tippgeschwindigkeit der aktiven Bahn. Einheit: %. |
Konfigurieren der Visualisierung:
|
Position |
Beschreibung |
|---|---|
|
8 |
Zeigt die Bewegung des Roboters, insbesondere die TCP-Bewegung (Tool Center Point / Arbeitspunkt) innerhalb der Arbeitsebene. |
|
9 |
Aktivieren Sie die Kontrollkästchen, um festzulegen, was in der angezeigt werden soll (Arbeitsbereich, Koordinatensystem). |
|
10 |
Klicken Sie auf eine der Schaltflächen, um eine feste Standardansicht für den Roboter auszuwählen. |
|
11 |
Bewegen Sie die Schieberegler zur Konfiguration des Drehens, der Übersetzung und des Zooms für den angezeigten Roboter. 11.0 Drehung um die X-Achse 11.1 Übersetzung in Richtung der X-Achse 11.2 Zoom |
Registerkarte „Automatic“
-
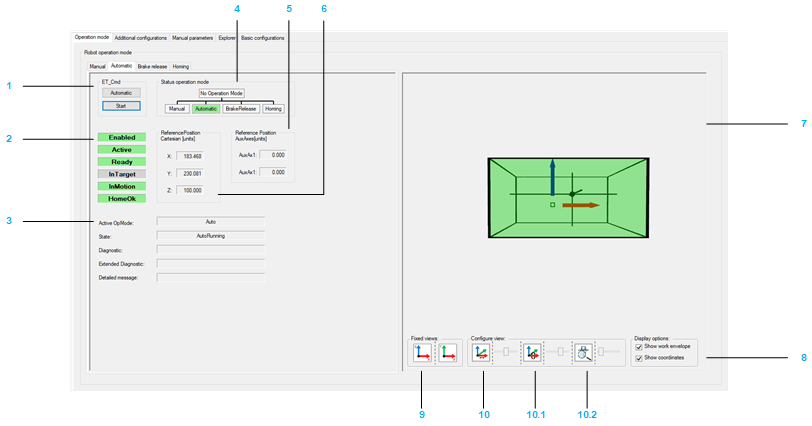
Die linke Seite der Registerkarte enthält Rückmeldungs- und Diagnoseinformationen zum Roboter.
-
Auf der rechten Seite der Registerkarte werden die Roboterbewegungen angezeigt. Die Visualisierung kann konfiguriert werden (siehe die oben).
|
Position |
Beschreibung |
|---|---|
|
1 |
Wenn sich das Modul nicht in der Betriebsart befindet, klicken Sie auf die Schaltfläche , um den Befehl RM.ET_Cmd.Auto zu senden, und klicken Sie anschließend auf die Schaltfläche , um den Befehl RM.ET_Cmd.Start zu senden.
HINWEIS: Sie können die Befehle auch über das ModuleInterface (z. B. iq_etCmd) senden.
Wenn die Betriebsart akzeptiert wird, wechselt die Hintergrundfarbe des Betriebsartstatus zu grün. |
|
2 |
|
|
3 |
Diagnose des Robotermoduls. Detaillierte Informationen finden Sie hier: ET_DiagExt im RoboticModule-Bibliothekshandbuch. |
|
4 |
Zeigt die Betriebsart des Moduls an. |
|
5 |
„AuxAxes“ wird nur angezeigt, wenn Hilfsachsen konfiguriert wurden. Detaillierte Informationen finden Sie hier: IF_RobotFeedback.ralrRefPositionAuxAx im Robotic-Bibliothekshandbuch. |
|
6 |
Detaillierte Informationen finden Sie hier: IF_RobotFeedback.rstRefPositionTCP im Robotic-Bibliothekshandbuch. |
Konfigurieren der Visualisierung:
|
Position |
Beschreibung |
|---|---|
|
7 |
Zeigt die Bewegung des Roboters, insbesondere die TCP-Bewegung (Tool Center Point / Arbeitspunkt) innerhalb der Arbeitsebene. |
|
8 |
Aktivieren Sie die Kontrollkästchen, um festzulegen, was in der angezeigt werden soll (Arbeitsbereich, Koordinatensystem). |
|
9 |
Klicken Sie auf eine der Schaltflächen, um eine feste Standardansicht für den Roboter auszuwählen. |
|
10 |
Bewegen Sie die Schieberegler zur Konfiguration des Drehens, der Übersetzung und des Zooms für den angezeigten Roboter. 10.0 Drehung um die X-Achse 10.1 Übersetzung in Richtung der X-Achse 10.2 Zoom |
Registerkarte „Brake Release“
-
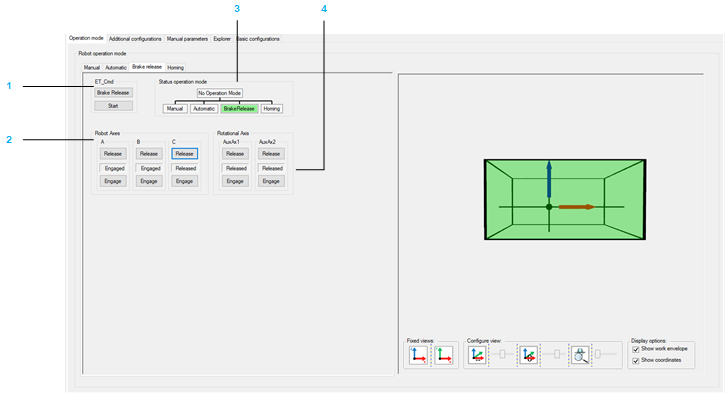
Die linke Seite der Registerkarte unterstützt Sie beim Lösen/Aktivieren der Bremse(n) eines oder mehrerer Roboter.
-
Auf der rechten Seite der Registerkarte werden die Roboterbewegungen angezeigt. Die Visualisierung kann konfiguriert werden (siehe die oben).
|
Position |
Beschreibung |
|---|---|
|
1 |
Wenn sich das Modul nicht in der Betriebsart befindet, klicken Sie auf die Schaltfläche , um den Befehl RM.ET_Cmd.BrakeRelease zu senden, und klicken Sie anschließend auf die Schaltfläche , um den Befehl RM.ET_Cmd.Start zu senden.
HINWEIS: Sie können die Befehle auch über das ModuleInterface (z. B. iq_etCmd) senden.
Wenn die Betriebsart akzeptiert wird, wechselt die Hintergrundfarbe des Betriebsartstatus zu grün. |
|
2 |
Die Anzeige zwischen den Schaltflächen und zeigt den Status der entsprechenden Bremse an. |
|
3 |
Zeigt die Betriebsart des Moduls an. |
|
4 |
Die Anzeige zwischen den Schaltflächen Release und Engage zeigt den Status der entsprechenden Bremse an. |
Registerkarte „Homing“
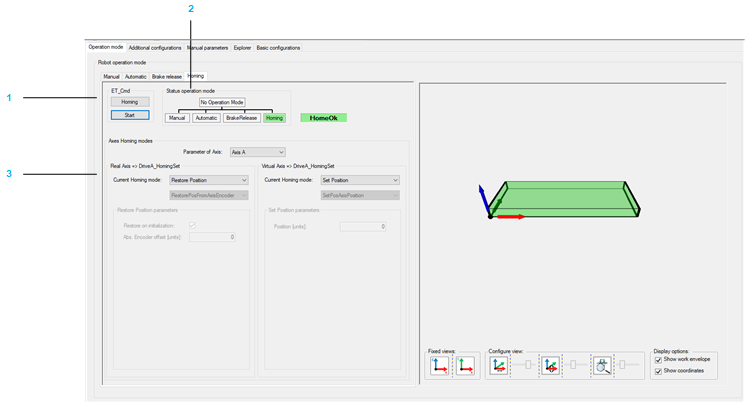
Auf der Registerkarte wird der Homing-Modus der Roboterachsen angezeigt.
|
Position |
Beschreibung |
|---|---|
|
1 |
Wenn sich das Modul nicht in der Betriebsart befindet, klicken Sie auf die Schaltfläche , um den Befehl RM.ET_Cmd.Homing zu senden, und klicken Sie anschließend auf die Schaltfläche , um den Befehl RM.ET_Cmd.Start zu senden.
HINWEIS: Sie können die Befehle auch über das ModuleInterface (z. B. iq_etCmd) senden.
Wenn die Betriebsart akzeptiert wird, wechselt die Hintergrundfarbe des Betriebsartstatus zu grün. |
|
2 |
Zeigt die Betriebsart des Moduls an. |
|
3 |
Zeigt den konfigurierten Referenzierungsmodus der jeweiligen Achse im Falle der Betriebsart und der Betriebsart an.
HINWEIS: Alle des kartesischen Roboters werden in der Bibliothek des Robotermoduls unterstützt.
|
Homing-Modi:
|
Modus |
Beschreibung |
|---|---|
|
Touchprobe |
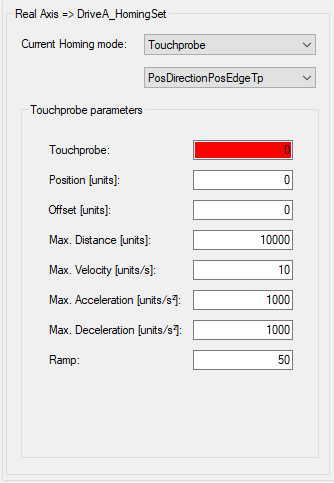
Detaillierte Informationen zu den Parametern finden Sie hier: PDL.ST_HomeTp. Hier finden Sie ebenfalls eine Liste der möglichen Touchprobe-Modi: PDL.ET_HomeTpMode. Stellen Sie sicher, dass Sie das richtige Touchprobe-Signal auswählen.
HINWEIS: Aufgrund der steuerungsabhängigen Touchprobe-Konfiguration (LMC Pro und Pro2: z. B. TP_0 - LMC Eco: z. B. ADI_1) wird eine Meldung mit dem Hinweis angezeigt, dass der Standardwert 0 mit einem gültigen Wert konfiguriert werden muss.
|
|
Input / Sensor |
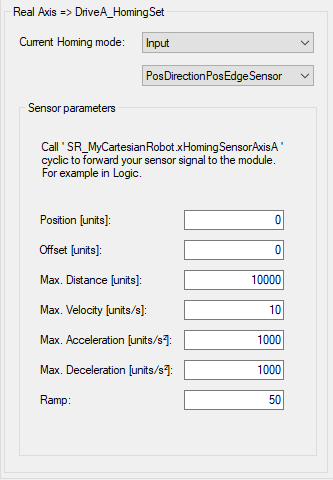
Detaillierte Informationen zu den Parametern finden Sie hier: PDL.ST_HomeIn. Hier finden Sie ebenfalls eine Liste der möglichen Input/Sensor-Modi: PDL.ET_HomeInMode. Verwenden Sie die Eigenschaft SR_<CartesianRobotName>.xHomingSensor<A | B | C | ..> (siehe das Kapitel Explorer), um den Sensorwert einzustellen. |
|
Limit Switch |
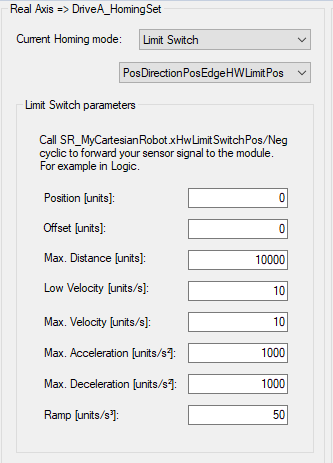
Detaillierte Informationen zu den Parametern finden Sie hier: PDL.ST_HomeLimitSwitch. Hier finden Sie ebenfalls eine Liste der möglichen Limit Switch-Modi: PDL.ET_HomeLimitSwitchMode Um das Signal des Hardwareendschalters einzustellen, müssen Sie den entsprechenden Wert in der festlegen (z. B. iq_stRoboticModuleItf.iq_ifHardwareLimit.raxAxisNegative). |
|
Torque |
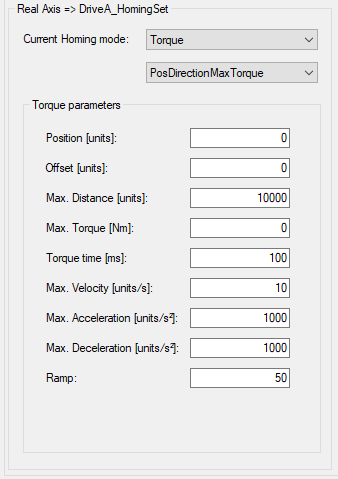
Detaillierte Informationen zu den Parametern finden Sie hier: PDL.ST_HomeTorque. Hier finden Sie ebenfalls eine Liste der möglichen Torque-Modi: PDL.ET_HomeTorqueMode. |
|
Move on Position |
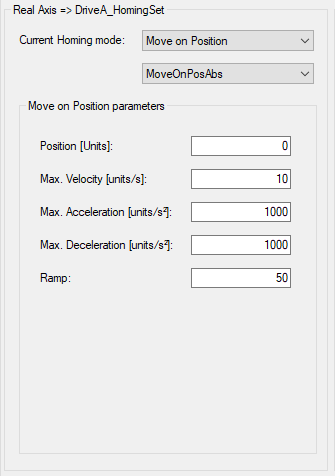
Detaillierte Informationen zu den Parametern finden Sie hier: PDL.ST_HomeMoveOnPos. |
|
Set Position |
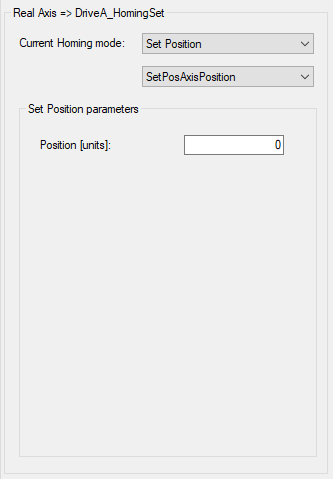
Detaillierte Informationen zu den Parametern finden Sie hier: PDL.ST_HomeSetPos. Hier finden Sie ebenfalls eine Liste der möglichen Torque-Modi: PDL.ET_HomeSetPosMode. |
|
Restore |
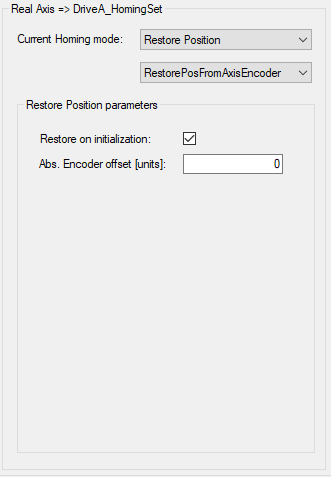
Detaillierte Informationen zu den Parametern finden Sie hier: PDL.ST_HomeSetPos. Hier finden Sie ebenfalls eine Liste der möglichen Eingangs-/Sensor-Modi: PDL.ET_HomeSetPosMode. |
|
Write Position |
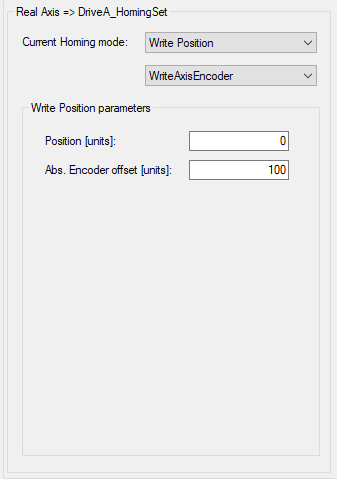
Detaillierte Informationen zu den Parametern finden Sie hier: PDL.ST_HomeWritePos. |