Funzioni da SLS1 a SLS4 – quattro differenti funzioni di velocità limitata in modo sicuro
Descrizione generale del funzionamento
Una funzione di velocità limitata in modo sicuro SLS causa la decelerazione controllata di un motore fino al raggiungimento di una velocità finale definita. L'asse decelera finché non è raggiunta una velocità finale limitata, la quale poi viene monitorata. SLS perciò impedisce al motore di superare la velocità limitata definita.
Il blocco di funzione mette a disposizione quattro funzioni di monitoraggio SLS separate: SLS1 – SLS4. Funzionano in modo identico ma si possono parametrizzare e richiedere in modo indipendente, permettendo così di monitorare quattro velocità diverse.
Quando diverse funzioni SLS vengono richieste allo stesso tempo, SLS1 ha la priorità più alta e SLS4 la priorità più bassa.
Quando si richiedono diverse funzioni SLS, la velocità finale più lenta v2 deve essere assegnata alla SLS con la priorità più alta:
v2(SLS1) <= v2(SLS2) <= v2(SLS3) <= v2(SLS4)
Eccezione: ogni valore v2 = 0 viene ignorato e non comporta errore.
Configurazioni diverse verranno considerate errore di configurazione e il modulo non raggiungerà lo stato di esercizio.
Esempio: la seguente configurazione è valida:
v2(SLS1) = 600, v2(SLS2) = 600, v2(SLS3) = 800 v2(SLS4) = 0
Monitoraggio del BF di sicurezza / modulo di sicurezza
Il comportamento di monitoraggio dipende dalla parametrizzazione del modulo di sicurezza:
-
Se il monitoraggio rampa è disattivato, il monitoraggio resta passivo fino al decorso del tempo t2 (si vedano la figura e la descrizione qui sotto).
-
Se il monitoraggio rampa è attivato, il modulo di sicurezza sorveglia la decelerazione del motore come specificato nella rampa.
Dopo la decelerazione del motore (controllata dal controllore standard), la funzione SLS passa a monitorare la velocità finale definita (SLS*_Speed[v2]) per prevenire eccessi di velocità.
La richiesta della funzione di sicurezza avviene all'inizio dell'intervallo di tempo t1 (segnale 'S_SLS*_Request' nel diagramma). t1 si imposta con il parametro di dispositivo SLS*_StartDelayTime[t1].
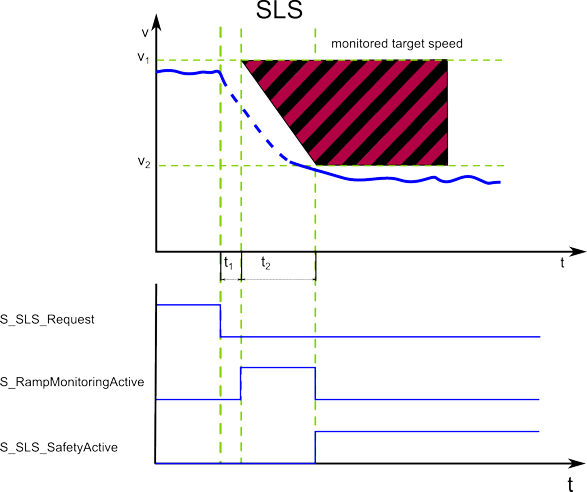
Entro l'intervallo di tempo t1, il controllore standard (non relativo alla sicurezza) riceve anch'esso la richiesta dal processo collegato e avvia la funzione di controllo del movimento in base alla logica e alla parametrizzazione del drive definita nell'applicazione standard (non relativa alla sicurezza).
Dopo il decorso di t1, la decelerazione del drive viene eseguita. La durata massima t2 permessa per questa fase di rampa discendente è definita dal parametro di dispositivo SLS*_RampMonitoringTime[t2].
Al decorso di t2, la velocità limitata finale definita SLS*_Speed[v2] deve essere raggiunta. La velocità V2 viene poi monitorata finché SLS rimane attiva.
Durante t2, la decelerazione può essere monitorata impostando il parametro di dispositivo SLS*_RampMonitoring = Activated.
Se il monitoraggio rampa è disattivato, la curva di decelerazione non viene monitorata. Durante t2 in questo caso è possibile anche un'accelerazione. La velocità finale deve essere comunque raggiunta prima del decorso di t2.
Se il monitoraggio rampa è attivato, la curva di decelerazione viene monitorata e deve corrispondere alla rampa parametrizzata (come in figura).
Se la velocità di traguardo SLS viene raggiunta correttamente, il blocco di funzione commuta S_SLS*_SafetyActive = SAFETRUE (si veda il diagramma).
Se la funzione di fallback SS1 viene attivata a causa di un errore rilevato come sopra descritto, il corrispondente stato è segnalato da S_SS1_SafetyActive = SAFETRUE.
Funzione di fallback
Quale funzione viene attivata come fallback dipende dall'attivazione o meno del monitoraggio rampa.
Se il monitoraggio rampa è disattivato, la curva di decelerazione non viene monitorata. Durante t2 in questo caso è possibile anche un'accelerazione. La velocità finale deve essere comunque raggiunta prima del decorso di t2. Altrimenti viene attivata SS1 come funzione di fallback definita.
Se il monitoraggio rampa è attivato, la curva di decelerazione viene monitorata e deve corrispondere alla rampa parametrizzata (come in figura). Altrimenti viene attivata STO come funzione di fallback definita.
Applicazione
La funzione SLS si usa quando personale deve accedere alla zona di operazione. Con l'ausilio della funzione SLS, la velocità viene prima ridotta e poi viene attivato il monitoraggio di sicurezza della velocità per prevenire superamenti accidentali del limite di velocità parametrizzato.
La disponibilità di quattro funzioni SLS diverse permette, ad esempio, di definire varie zone di avvicinamento: più una persona si avvicina alla zona di operazione e più la velocità viene ridotta.
Per informazioni sulla risoluzione dell'encoder del motore utilizzato, si veda il manuale d'utenza del motore SH3/MH3 che fa parte della Guida online Machine Expert (Motore Lexium SH3 – Manuale del prodotto o Motore Lexium MH3 – Manuale del prodotto).
Determinare la risoluzione come segue:
-
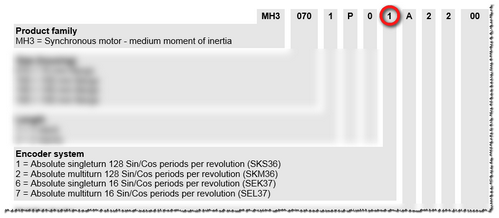
La cifra 10 nel codice di tipo del motore indica il sistema di codificazione implementato.
-
La sezione "Codice di tipo" nel capitolo 1 del manuale del motore contiene informazioni sul numero di periodi sin/cos per rivoluzione.
Esempio manuale motore
Come implementare la funzione di sicurezza
Procedere come segue per implementare questa funzione di sicurezza nella vostra applicazione di sicurezza:
-
Nella finestra dei 'Dispositivi' di Machine Expert inserire un modulo di sicurezza per il drive utilizzato.
-
In Machine Expert – Safety, inserire un BF Preventa Motion SF_SafeMotionControl nel codice di sicurezza e collegarlo come occorre.
-
Nella finestra 'Dispositivi' di Machine Expert – Safety, marcare il modulo di sicurezza nell'albero dei dispositivi ed editare i parametri di sicurezza nel gruppo 'Mechanic' e nel gruppo 'SafeLimitedSpeed'.
Per dettagli vedere la descrizione dei parametri del modulo opzionale di sicurezza Lexium 62 LXM/modulo opzionale di sicurezza Lexium 62 ILM.