ILM62FS - Modulo di sicurezza per drive ILM62 (SLCv1)
Questo argomento si riferisce a un modulo della generazione SLCv1 (in un sistema di sicurezza con un dispositivo SLC100 o SLC200). Per identificare la generazione di dispositivo configurata nel vostro progetto, vedere la breve descrizione del dispositivo in cima alla griglia dei parametri (con dispositivo selezionato nell'albero a sinistra).
Tipo di modulo / campi d'applicazione relativi alla sicurezza
Sono supportate le seguenti funzioni di sicurezza:
Il concetto di sicurezza si basa sulla considerazione generale che la movimentazione di sicurezza necessaria viene eseguita dal controllore standard (non relativo alla sicurezza) e dal drive. Le funzioni di sicurezza perciò si limitano a sorvegliare il movimento dell'asse ma non lo controllano.
Se il sistema di sicurezza rileva un'esecuzione non corretta della movimentazione o un errore interno del drive, ne conseguono le seguenti misure:
-
il drive conclude la funzione di sicurezza in corso e
-
il sistema di sicurezza avvia il livello di fallback richiesto (ad es., lo stato sicuro definito) e
-
lo stadio di potenza del drive viene disattivato. Di conseguenza, il motore non ha momento torcente e si arresta.
Esempio: la funzione di sicurezza SLS (Safely Limited Speed) sorveglia il limite di velocità configurato del drive. Al superamento del limite di velocità definito, la funzione di fallback SS1, seguita da STO, commuta il motore in stato senza propulsione.
L'implementazione del monitoraggio di sicurezza deve essere fatto nel programma applicativo di sicurezza (programma SLC) utilizzando il blocco di funzione di sicurezza Preventa SF_SafeMotionControl.
Se un modulo di sicurezza fa parte della struttura bus Sercos, il progetto di sicurezza Machine Expert – Safety non si può compilare con successo se non viene usato un blocco di funzione di sicurezza Preventa SF_SafeMotionControl.
Si veda il capitolo della Guida "Blocco di funzione Preventa SF_SafeMotionControl" per maggiori informazioni.
I moduli di sicurezza Schneider Electric si possono usare in applicazioni di sicurezza a norma
-
EN ISO 13849, PL e
-
IEC 62061, SIL 3
-
IEC 61508, SIL 3
Gruppo: Basic
Parametro: RevFWMinRichiesta
|
Valore predefinito |
Release di base |
|
Unità |
-/- |
|
Descrizione |
Questo parametro è rilevante solo quando sono implementate versioni di firmware diverse dalla versione caricata dal costruttore. Per passare in stato operazionale, sul modulo deve essere installata la versione del firmware qui parametrizzata o una versione più recente.
La versione di firmware qui selezionata è particolarmente importante per quanto riguarda parametri o elementi di dati di processo che sono stati implementati con una determinata versione di firmware. Se il dispositivo con il quale state lavorando ha parametri o elementi di dati di processo nuovi, tenere conto dei seguenti aspetti: se RevFWMinRichiesta è settato a un valore errato, o il SLC non entrerà in stato operazionale "in funzione" o i nuovi parametri/elementi di dati di processo non verranno presi in considerazione dal SLC. Tenere conto del messaggio di pericolo sotto questa tabella.
Altre informazioni:
Informazioni aggiornate su parametri e elementi di dati di processo aggiunti di recente si trovano nelle note sulla versione che avete ricevuto con il pacchetto firmware. Le note sulla versione descrivono anche come identificare la versione del firmware attualmente installata sul dispositivo di sicurezza. |
| AVVERTIMENTO | |
|---|---|
Parametro: Opzionale
|
Valore preimpostato |
No |
|
Unita |
-/- |
|
Descrizione |
Questo parametro permette di configurare come opzionale il modulo. I moduli opzionali non devono essere disponibili (presenti fisicamente o comunicativi), cioè il Safety Logic Controller non segnala se un modulo opzionale non è disponibile. Questo parametro non influisce sul segnale del modulo o sullo stato dei dati. |
|
Valori possibili |
|
Il parametro Opzionale è un meccanismo per scalare il sistema di sicurezza in funzione di varie configurazioni del progetto macchina. Può darsi, comunque, che i moduli contrassegnati come opzionali in una configurazione del progetto macchina siano indispensabili in altre configurazioni.
| AVVERTIMENTO | |
|---|---|
Parametro: HW_STO_Config
|
Valore preimpostato |
HW_STO usato |
|
Unita |
-/- |
|
Descrizione |
Specifica se la funzione di sicurezza STO può essere richiesta solo via software o, in aggiunta, anche tramite il link cablato del drive. |
|
Valori possibili |
Nelle tabelle di qui sopra, SW significa "trasmissione via software della richiesta STO, tramite l'ingresso S_STO_Request del blocco di funzione" e HW significa "trasmissione via hardware della richiesta STO". |


| AVVERTIMENTO | |
|---|---|
Parametro: ConfigFeedbackSicura
|
Valore preimpostato |
SafeSpeed [unità/s] |
|
Unita |
-/- |
|
Descrizione |
Specifica se l'elemento di dati di processo di sicurezza SafeFeedback emette la velocità dell'asse o il valore incrementale fornito dall'encoder come valore leggibile nell'applicazione di sicurezza. Fare riferimento alla sezione sottostante per una descrizione dell'elemento di dati di processo. |
|
Valori possibili |
|
Gruppo: SafetyResponseTime
Il tempo di risposta di sicurezza è l'intervallo tra la ricezione del segnale del sensore al canale d'ingresso di un modulo d'ingresso di sicurezza e l'emissione del segnale di disinserimento al canale d'uscita di un modulo di sicurezza. Per ulteriori e dettagliate informazioni di sottofondo, fare riferimento all'argomento "Tempo di risposta di sicurezza per SLCv1" nella "Guida utente "Machine Expert – Safety".
I parametri in questo gruppo influiscono sul tempo di risposta di sicurezza del sistema Safety Logic Controller. I parametri WatchdogComunicazione, TempoTrasportoDatiMin e TempoTrasportoDatiMax in questo gruppo influiscono sul modulo solo se il parametro ConfigurazioneManuale è settato a 'Sì'.
Parametro: ConfigurazioneManuale
|
Valore predefinito |
No |
|
Unità |
-/- |
|
Descrizione |
Specifica se il modulo usa i propri parametri rilevanti per il tempo di risposta di sicurezza (WatchdogComunicazione, TempoTrasportoDatiMin e TempoTrasportoDatiMax) o i valori specificati nel gruppo di parametri 'SafetyResponseTimeDefaults' del Safety Logic Controller. La gestione dei parametri in modo separato per ciascun modulo ottimizza il sistema per quanto riguarda i requisiti specifici dell'applicazione relativi al tempo di risposta di sicurezza. |
|
Valore del parametro |
|
Parametro: TempoTrasportoDatiMin
|
Valore predefinito |
12 |
|
Fascia di valori Ampiezza passo |
12...65.535 1 |
|
Unità |
100 µs |
|
Descrizione |
Definisce il tempo minimo necessario per trasmettere un telegramma di dati da un produttore a un consumatore. Se il telegramma arriva (al consumatore) prima di quanto specificato in questo valore di parametro, la comunicazione viene considerata non valida. Machine Expert – Safety mette a disposizione un dialogo di calcolo per determinare questo valore di parametro. Definizione dei termini e informazioni di sottofondo In base alla specifica openSAFETY, i dispositivi (moduli I/O di sicurezza nonché il Safety Logic Controller) comunicano trasmettendo e ricevendo ciclicamente dati chiamati telegrammi openSAFETY. Un dispositivo che genera (trasmette) telegrammi viene chiamato produttore, un dispositivo che li riceve un consumatore. Ciascun telegramma include una marca temporale per la validazione della data e ora di comunicazione. Al ricevimento di un telegramma, il consumatore confronta questa marca temporale con la data e ora attuale. Se la tempistica è rispettata, la comunicazione viene considerata valida. Se un telegramma viene ricevuto prima di quanto definito in questo parametro, la comunicazione viene considerata non valida e non viene elaborata oltre. Inoltre, in questo caso l'elemento di dati di processo 'SafeModuleOK' diventa SAFEFALSE, indicando che la comunicazione di sicurezza del modulo non è più valida. Le implicazioni per il resto del sistema di sicurezza dipendono dalla definizione della funzione di sicurezza. |
|
Calcolo del valore |
Come calcolare il valore TempoTrasportoDatiMin per lo specifico modulo
|
|
Valori pratici |
L'immissione del valore TempoTrasportoDatiMin calcolato in Machine Expert – Safety dà adito a un sistema stabile. |
Parametro: TempoTrasportoDatiMax
|
Valore predefinito |
200 |
|
Fascia di valori Ampiezza passo |
12...65.535 1 |
|
Unità |
100 µs |
|
Descrizione |
Definisce il tempo massimo permesso per trasmettere un telegramma di dati da un produttore a un consumatore. Se un telegramma giunge (al consumatore) più tardi di quanto specificato da questo valore di parametro, la comunicazione viene considerata non valida. Machine Expert – Safety mette a disposizione un dialogo di calcolo per determinare questo valore di parametro.
NOTA:
Il valore del parametro influisce sul tempo di risposta di sicurezza calcolato da Machine Expert – Safety. Definizione dei termini e informazioni di sottofondo In base alla specifica openSAFETY, i dispositivi (moduli I/O di sicurezza nonché il Safety Logic Controller) comunicano trasmettendo e ricevendo ciclicamente dati chiamati telegrammi openSAFETY. Un dispositivo che genera (trasmette) telegrammi viene chiamato produttore, un dispositivo che li riceve un consumatore. Ciascun telegramma include una marca temporale per la validazione della data e ora di comunicazione. Al ricevimento di un telegramma, il consumatore confronta questa marca temporale con la data e ora attuale. Se la tempistica è rispettata, la comunicazione viene considerata valida. Se il telegramma arriva dopo quanto definito nel parametro, la comunicazione viene considerata non valida e non viene elaborata oltre. Le implicazioni per il resto del sistema di sicurezza dipendono dalla definizione della funzione di sicurezza. |
|
Calcolo del valore |
Come calcolare il valore TempoTrasportoDatiMax per lo specifico modulo
|
|
Valori pratici |
L'immissione del valore TempoTrasportoDatiMax calcolato in Machine Expert – Safety dà adito a un sistema stabile. |
Parametro: WatchdogComunicazione
|
Valore predefinito |
200 |
|
Fascia di valori Ampiezza passo |
1...65.535 1 |
|
Unità |
100 µs |
|
Descrizione |
Definisce l'intervallo di tempo massimo entro il quale un consumatore deve ricevere un telegramma di dati valido da un produttore per poter considerare valida la comunicazione di sicurezza e continuare l'applicazione. Il parametro imposta un temporizzatore "watchdog" che sorveglia se il consumatore riceve in tempo i telegrammi provenienti da un produttore. Se il watchdog decorre, la comunicazione viene considerata non valida. Machine Expert – Safety contiene un calcolatore per determinare questo valore di parametro.
NOTA:
Il valore del parametro influisce sul tempo di risposta di sicurezza calcolato da Machine Expert – Safety. Definizione dei termini e informazioni di sottofondo In base alla specifica openSAFETY, i dispositivi (moduli I/O di sicurezza nonché il Safety Logic Controller) comunicano trasmettendo e ricevendo ciclicamente dati chiamati telegrammi openSAFETY. Un dispositivo che genera (trasmette) telegrammi viene chiamato produttore, un dispositivo che li riceve un consumatore. Il valore WatchdogComunicazione dipende fisicamente dal tempo di trasporto necessario per trasmettere il telegramma da un produttore a un consumatore e influisce sul tempo di risposta del sistema nella peggiore delle ipotesi. Il valore di parametro calcolato perciò dipende dal valore del parametro TempoTrasportoDatiMax. Se il consumatore riceve in tempo il telegramma (communication watchdog non decorso e tempo di trasmissione rientrante nella fascia specificata dai parametri TempoTrasportoDatiMin e TempoTrasportoDatiMax), il temporizzatore di watchdog viene riavviato e la comunicazione viene considerata valida. La marca temporale contenuta nel telegramma ricevuto non viene valutata, è rilevante solo la ricezione di un telegramma valido. Se il consumatore non riceve alcun telegramma (a causa di ritardo o perdita) e il watchdog di comunicazione del consumatore scade, il modulo viene settato in stato sicuro definito. Inoltre, in questo caso l'elemento di dati di processo 'SafeModuleOK' diventa SAFEFALSE, indicando che la comunicazione di sicurezza del modulo non è più valida. |
|
Calcolo del valore |
Come calcolare il valore WatchdogComunicazione per lo specifico modulo
|
|
Valori pratici |
Per il valore WatchdogComunicazione che dovete immettere nella tabella dei parametri (finestra 'Dispositivi'), tenere conto dei seguenti aspetti:
|
Gruppo: Mechanic
Parametro: TipoEncoder
|
Valore preimpostato |
Encoder rotativo |
|
Unita |
-/- |
|
Descrizione |
Specifica il tipo di encoder. |
|
Valori possibili |
|
Parametro: RisoluzioneEncoderRotativo
|
Valore preimpostato |
128 |
|
Unita |
Periodi sin/cos per rivoluzione |
|
Fascia valori Ampiezza passo |
16...1024 1 |
|
Descrizione |
Specifica la risoluzione dell'encoder per encoder rotativi.
NOTA:
Il valore di parametro è applicabile solo se il parametro TipoEncoder è settato a |
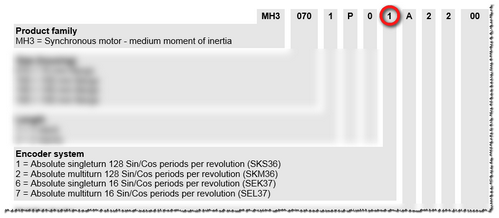
Per informazioni sulla risoluzione dell'encoder del motore utilizzato, si veda il manuale d'utenza del motore SH3/MH3 che fa parte della Guida online Machine Expert (Motore Lexium SH3 – Manuale del prodotto o Motore Lexium MH3 – Manuale del prodotto).
Determinare la risoluzione come segue:
-
La cifra 10 nel codice di tipo del motore indica il sistema di codificazione implementato.
-
La sezione "Codice di tipo" nel capitolo 1 del manuale del motore contiene informazioni sul numero di periodi sin/cos per rivoluzione.
Esempio manuale motore
Parametro: CostanteAvanzRotativo
|
Valore preimpostato |
360 |
|
Unita |
unità per rivoluzione |
|
Fascia valori Ampiezza passo |
1...4.294.967.295 1 |
|
Descrizione |
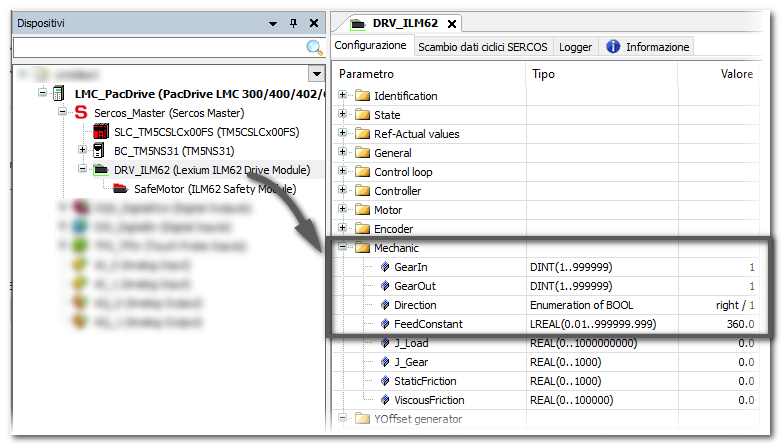
Specifica la costante di avanzamento per encoder rotativi. La costante di avanzamento è il percorso (in unità) coperto da una rotazione dell'albero. Immettere lo stesso valore specificato nei parametri del relativo drive in Machine Expert (si veda la figura sotto).
NOTA:
Il valore di parametro è applicabile solo se il parametro TipoEncoder è settato a Per maggiori informazioni su questo parametro, si veda il relativo capitolo relativo al drive della Guida online di Machine Expert. |
Ubicazione del relativo parametro drive in Machine Expert:
Parametro: TrasmissioneIn
|
Valore preimpostato |
1 |
|
Unità |
unità per rivoluzione |
|
Fascia valori Ampiezza passo |
-2.147.483.646...2.147.483.647 1 |
|
Descrizione |
Specifica il numero di denti dell'ingranaggio in ingresso sul lato motore (IN nella figura sotto). Assieme al parametro TrasmissioneOut (si veda la descrizione sotto), questo parametro definisce il rapporto di trasmissione tra motore e carico. 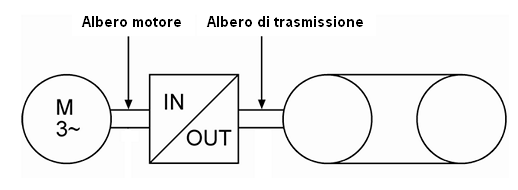
Immettere lo stesso valore specificato nei parametri del relativo drive in Machine Expert (si veda la figura sotto). Per maggiori informazioni su questo parametro e su come calcolarlo, si veda il relativo capitolo della Guida online di Machine Expert. |
Ubicazione del relativo parametro drive in Machine Expert:
Parametro: TrasmissioneOut
|
Valore preimpostato |
1 |
|
Unita |
unità per rivoluzione |
|
Fascia valori Ampiezza passo |
-2.147.483.646...2.147.483.647 1 |
|
Descrizione |
Specifica il numero di denti dell'ingranaggio in uscita sul lato motore (OUT nella figura sotto). Assieme al parametro TrasmissioneIn (si veda la descrizione sopra), questo parametro definisce il rapporto di trasmissione tra motore e carico.
Immettere lo stesso valore specificato nei parametri del relativo drive in Machine Expert (si veda la figura sotto). Per maggiori informazioni su questo parametro e su come calcolarlo, si veda il relativo capitolo della Guida online di Machine Expert. |
Ubicazione del relativo parametro drive in Machine Expert:
Parametro: RisoluzioneEncoderLineare
|
Valore preimpostato |
1000 |
|
Unita |
Lunghezza di un periodo in µm |
|
Fascia valori Ampiezza passo |
100...100000 1 |
|
Descrizione |
Specifica la risoluzione dell'encoder per encoder lineari. 1 unità = lunghezza periodo definita in µm.
NOTA:
Il valore di parametro è applicabile solo se il parametro TipoEncoder è settato a |
Parametro: CostanteAvanzLineare
|
Valore preimpostato |
1000 |
|
Unita |
unità/m |
|
Fascia valori Ampiezza passo |
1..4294967295 1 |
|
Descrizione |
Specifica la costante di avanzamento per encoder lineari in unità/m. La costante di avanzamento è il percorso (in unità) che copre la lunghezza di 1m. Immettere lo stesso valore specificato nei parametri del relativo drive in Machine Expert (si veda la figura sotto).
NOTA:
Il valore di parametro è applicabile solo se il parametro TipoEncoder è settato a |
Ubicazione del relativo parametro drive in Machine Expert:
Parametro: DirezioneEncoder
|
Valore preimpostato |
non invertito |
|
Unita |
-/- |
|
Descrizione |
Specifica la direzione encoder (a dipendere dal tipo di encoder). |
|
Valori possibili |
|
Parametro: FiltroPosizione
|
Valore preimpostato |
2 |
|
Unita |
ms |
|
Descrizione |
Definisce il tempo di filtraggio per il valore di posizione calcolato in base agli ingressi encoder. Utilizzando il filtro si possono sopprimere impulsi di interferenza o rumori che disturbano. Quanto più alto è il valore, tanto più tollerante è il modulo di sicurezza. Un valore di tempo di filtraggio troppo alto però può dare adito alla perdita di impulsi encoder (voluti). Dato che il calcolo della velocità dipende dal posizionamento dell'encoder, il tempo di filtraggio influisce anche sul valore di velocità calcolato. Il valore di velocità calcolato a sua volta viene usato come dato di ingresso per le funzioni di sicurezza SOS, SS2 e SDI. In aggiunta, il valore di velocità serve per monitorare la rampa di decelerazione in tutte le funzioni di sicurezza e per sorvegliare i limiti di velocità di SLS e SMS. |
|
Valori possibili |
I valori di parametro si selezionano da un elenco a discesa (tipo di dati ENUM). Sono selezionabili i valori: 2, 4, 8, 16, 32, 64. Tenere conto dell'avvertenza sotto questa tabella. |
| AVVERTIMENTO | |
|---|---|
Gruppo: SafeStop1
I parametri di questo gruppo si usano per definire la funzione di sicurezza Safe Stop 1 (SS1).
Parametro: SS1_RitardoInizio[t1]
|
Valore preimpostato |
0 |
|
Fascia valori Ampiezza passo |
0...300.000 1 |
|
Unita |
ms |
|
Descrizione |
Specifica il tempo di ritardo dopo il quale parte il monitoraggio della funzione di sicurezza. Questo valore deve corrispondere al periodo di tempo che l'intero sistema di controllo del movimento richiede per reagire, ossia al tempo dopo il quale il controllore standard (non relativo alla sicurezza) può avviare la funzione di sicurezza richiesta dopo avere ricevuto la richiesta codificata in forma di word di controllo dei dati di processo tramite il bus SERCOS. |
|
Valori possibili |
Il valore qui impostato deve essere pari o superiore al tempo di risposta dell'intero sistema, incluso il tempo di risposta del sistema standard. Il valore non può essere inferiore al tempo di risposta totale minimo possibile dei componenti coinvolti, ossia del primo momento a partire dal quale il drive è in grado di decelerare. |
Parametro: SS1_MonitoraggioRampa
|
Valore preimpostato |
Disattivato |
|
Unita |
-/- |
|
Descrizione |
Attiva o disattiva il monitoraggio rampa, cioè il monitoraggio della curva di decelerazione. |
|
Valori possibili |
|
Parametro: SS1_VelocitaMaxRampa[v1]
|
Valore preimpostato |
0 |
|
Fascia valori Ampiezza passo |
0...65.535 1 |
|
Unita |
unità/s |
|
Descrizione |
Il parametro è rilevante solo se è attivo il monitoraggio rampa (si veda il parametro precedente).
Il valore influisce sul gradiente della rampa di decelerazione (si veda il parametro |
Parametro: SS1_TempoMonitoraggioRampa[t2]
|
Valore preimpostato |
0 |
|
Fascia valori Ampiezza passo |
0...300.000 1 |
|
Unita |
unità/s |
|
Descrizione |
Specifica la durata in millisecondi dopo la quale la velocità deve essere pari a zero (t2 in figura) e STO è attivato. 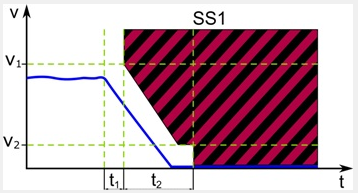
Se è attivato il monitoraggio rampa, questo valore influisce sul gradiente della rampa di decelerazione (si veda il parametro |
Parametro: SS1_VelocitaMinRampa[v2]
|
Valore preimpostato |
0 |
|
Fascia valori Ampiezza passo |
0...65.535 1 |
|
Unita |
unità/s |
|
Descrizione |
Specifica la deviazione di velocità permessa (ossia, la velocità massima) durante lo stato di fermo (v2 in figura). Se la deviazione supera il valore definito, viene attivata la funzione STO come funzione di fallback.
Per la funzione SS1, la posizione viene monitorata dopo il raggiungimento della velocità zero e finché t2 non è ancora decorso, ossia finché STO non è ancora attivo.
Se è attivato il monitoraggio rampa, questo valore influisce sul gradiente della rampa di decelerazione (si veda il parametro |
La funzione SS1 è identica alla funzione STO se non vengono specificati valori nella relativa sezione dei parametri di dispositivo o se SS1_RitardoInizio[t1] e SS1_TempoMonitoraggioRampa[t2] sono impostati a 0.
Gruppo: SafeStop2
I parametri di questo gruppo si usano per definire la funzione di sicurezza Safe Stop 2 (SS2).
Parametro: SS2_RitardoInizio[t1]
|
Valore preimpostato |
0 |
|
Fascia valori Ampiezza passo |
0...300.000 1 |
|
Unita |
ms |
|
Descrizione |
Specifica il tempo di ritardo dopo il quale parte il monitoraggio della funzione di sicurezza. Questo valore deve corrispondere al periodo di tempo che l'intero sistema di controllo del movimento richiede per reagire, ossia al tempo dopo il quale il controllore standard (non relativo alla sicurezza) può avviare la funzione di sicurezza richiesta dopo avere ricevuto la richiesta codificata in forma di word di controllo dei dati di processo tramite il bus SERCOS. |
|
Valori possibili |
Il valore qui impostato deve essere pari o superiore al tempo di risposta dell'intero sistema, incluso il tempo di risposta del sistema standard. Il valore non può essere inferiore al tempo di risposta totale minimo possibile dei componenti coinvolti, ossia del primo momento a partire dal quale il drive è in grado di decelerare. |
Parametro: SS2_MonitoraggioRampa
|
Valore preimpostato |
Disattivato |
|
Unita |
-/- |
|
Descrizione |
Attiva o disattiva il monitoraggio rampa, cioè il monitoraggio della curva di decelerazione. |
|
Valori possibili |
|
Parametro: SS2_VelocitaMaxRampa[v1]
|
Valore preimpostato |
0 |
|
Fascia valori Ampiezza passo |
0...65.535 1 |
|
Unita |
unità/s |
|
Descrizione |
Il parametro è rilevante solo se è attivo il monitoraggio rampa (si veda il parametro precedente).
Il valore influisce sul gradiente della rampa di decelerazione (si veda il parametro |
Parametro: SS2_TempoMonitoraggioRampa[t2]
|
Valore preimpostato |
Disattivato |
|
Fascia valori Ampiezza passo |
0...300.000 1 |
|
Unita |
unità/s |
|
Descrizione |
Specifica la durata in millisecondi dopo la quale la velocità deve essere pari a zero (t2 in figura) e il monitoraggio di fermo SS2 è attivato (in modo simile a SOS). 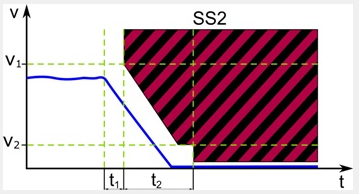
Se è attivato il monitoraggio rampa, questo valore influisce sul gradiente della rampa di decelerazione (si veda il parametro |
Parametro: SS2_VelocitaMinRampa[v2]
|
Valore preimpostato |
0 |
|
Fascia valori Ampiezza passo |
0...65.535 1 |
|
Unita |
unità/s |
|
Descrizione |
Specifica la deviazione di velocità permessa (ossia, la velocità massima) durante lo stato di fermo (v2 in figura). Se la deviazione supera il valore definito, viene attivata la funzione STO come funzione di fallback.
Per la funzione SS2, la posizione viene monitorata dopo il raggiungimento della velocità zero e finché t2 non è decorso, ossia finché il monitoraggio dello stato di fermo SS2 non è ancora attivo (come per SOS).
Se è attivato il monitoraggio rampa, questo valore influisce sul gradiente della rampa di decelerazione (si veda il parametro |
Parametro: SS2_TolleranzaPosizione[sTol]
|
Valore preimpostato |
0 |
|
Fascia valori Ampiezza passo |
0...65.535 1 |
|
Unita |
unità |
|
Descrizione |
Specifica la deviazione permessa dalla posizione di fermo monitorata. Se la deviazione supera il valore definito, viene attivata la funzione STO come funzione di fallback. |
La funzione SS2 è identica alla funzione SOS se non vengono specificati valori nella relativa sezione dei parametri di dispositivo.
Gruppo: SafeLimitedSpeed
I parametri di questo gruppo si usano per definire la funzione di sicurezza Safe Limited Speed (SLS).
Il modulo di sicurezza mette a disposizione quattro funzioni SLS (di limitazione della velocità in modo sicuro) separate: SLS1 - SLS4. Sono configurabili con parametri separati, in altre parole, ogni parametro è disponibile per ogni funzione di SLS. Nelle descrizioni che seguono, * segna il posto di SLS1 - SLS4.
Parametro: SLS*_RitardoInizio[t1]
|
Valore preimpostato |
0 |
|
Fascia valori Ampiezza passo |
0...300.000 1 |
|
Unita |
ms |
|
Descrizione |
Specifica il tempo di ritardo dopo il quale parte il monitoraggio della funzione di sicurezza. Questo valore deve corrispondere al periodo di tempo che l'intero sistema di controllo del movimento richiede per reagire, ossia al tempo dopo il quale il controllore standard (non relativo alla sicurezza) può avviare la funzione di sicurezza richiesta dopo avere ricevuto la richiesta codificata in forma di word di controllo dei dati di processo tramite il bus SERCOS. |
|
Valori possibili |
Il valore qui impostato deve essere pari o superiore al tempo di risposta dell'intero sistema, incluso il tempo di risposta del sistema standard. Il valore non può essere inferiore al tempo di risposta totale minimo possibile dei componenti coinvolti, ossia del primo momento a partire dal quale il drive è in grado di decelerare. |
Parametro: SLS*_MonitoraggioRampa
|
Valore preimpostato |
Disattivato |
|
Unita |
-/- |
|
Descrizione |
Attiva o disattiva il monitoraggio rampa, cioè il monitoraggio della curva di decelerazione. |
|
Valori possibili |
|
Parametro: SLS*_VelocitaMaxRampa[v1]
|
Valore preimpostato |
0 |
|
Fascia valori Ampiezza passo |
0...65.535 1 |
|
Unita |
unità/s |
|
Descrizione |
Il parametro è rilevante solo se è attivo il monitoraggio rampa (si veda il parametro precedente).
Il valore influisce sul gradiente della rampa di decelerazione (si veda il parametro |
Parametro: SLS*_TempoMonitoraggioRampa[t2]
|
Valore preimpostato |
Disattivato |
|
Fascia valori Ampiezza passo |
0...300.000 1 |
|
Unita |
unità/s |
|
Descrizione |
Il parametro definisce la durata in millisecondi (t2 in figura) dopo la quale deve essere raggiunta la velocità parametrizzata (parametro 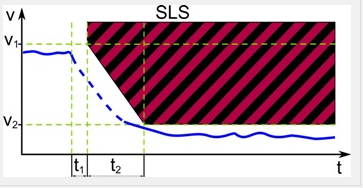
Se è attivato il monitoraggio rampa, questo valore influisce sul gradiente della rampa di decelerazione (si veda il parametro |
Parametro: SLS*_Velocita[v2]
|
Valore preimpostato |
0 |
|
Fascia valori Ampiezza passo |
0...65.535 1 |
|
Unita |
unità/s |
|
Descrizione |
Definisce la velocità finale impostata, che deve essere raggiunta al più tardi entro il tempo t2, per poi rimanere monitorata finché SLS resta attivo.
Il valore di
Se è attivato il monitoraggio rampa, questo valore influisce sul gradiente della rampa di decelerazione (si veda il parametro |
Quando si usa la funzione SLS deve essere parametrizzata anche la funzione SS1.
Gruppo: SafeOperatingStop
I parametri di questo gruppo si usano per definire la funzione di sicurezza Safe Operating Stop (SOS).
Parametro: SOS_RitardoInizio[t1]
|
Valore preimpostato |
0 |
|
Fascia valori Ampiezza passo |
0...300.000 1 |
|
Unita |
ms |
|
Descrizione |
Specifica il tempo di ritardo dopo il quale parte il monitoraggio della funzione di sicurezza. Questo valore deve corrispondere al periodo di tempo che l'intero sistema di controllo del movimento richiede per reagire, ossia al tempo dopo il quale il controllore standard (non relativo alla sicurezza) può avviare la funzione di sicurezza richiesta dopo avere ricevuto la richiesta codificata in forma di word di controllo dei dati di processo tramite il bus SERCOS. |
|
Valori possibili |
Il valore qui impostato deve essere pari o superiore al tempo di risposta dell'intero sistema, incluso il tempo di risposta del sistema standard. Il valore non può essere inferiore al tempo di risposta totale minimo possibile dei componenti coinvolti, ossia del primo momento a partire dal quale il drive è in grado di decelerare. |
Parametro: SOS_TolleranzaPosizione[sTol]
|
Valore preimpostato |
0 |
|
Fascia valori Ampiezza passo |
0...65.535 1 |
|
Unita |
unità |
|
Descrizione |
Definisce la deviazione permessa dalla posizione di fermo monitorata (STol nella figura qui sopra). Se la deviazione supera il valore definito, viene attivata la funzione STO come funzione di fallback. 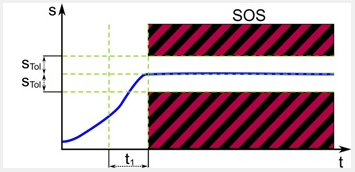
|
Gruppo: SafeMaximumSpeed
I parametri di questo gruppo si usano per definire la funzione di sicurezza Safe Maximum Speed (SMS) (velocità di sicurezza massima).
Parametro: SMS_VelocitaMax
|
Valore preimpostato |
100 |
|
Fascia valori Ampiezza passo |
0...65.535 1 |
|
Unita |
unità/s |
|
Descrizione |
Definisce la velocità di sicurezza massima che non deve essere superata mai.
Il valore della/e 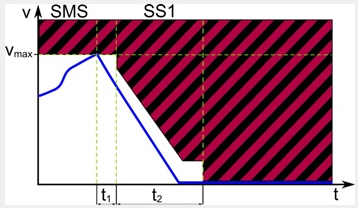
|
Gruppo: SafeDirection
I parametri di questo gruppo si usano per definire la funzione di sicurezza Safe Direction (SDI) (direzione di sicurezza). Essi si usano per configurare entrambe le funzioni, sia SDIneg sia SDIpos. Nonostante vengano parametrizzate in modo identico, si possono richiedere indipendentemente l'una dall'altra.
Parametro: SDI_RitardoInizio[t1]
|
Valore preimpostato |
0 |
|
Fascia valori Ampiezza passo |
0...300.000 1 |
|
Unita |
ms |
|
Descrizione |
Specifica il tempo di ritardo dopo il quale parte il monitoraggio della funzione di sicurezza. Questo valore deve corrispondere al periodo di tempo che l'intero sistema di controllo del movimento richiede per reagire, ossia al tempo dopo il quale il controllore standard (non relativo alla sicurezza) può avviare la funzione di sicurezza richiesta dopo avere ricevuto la richiesta codificata in forma di word di controllo dei dati di processo tramite il bus SERCOS. |
|
Valori possibili |
Il valore qui impostato deve essere pari o superiore al tempo di risposta dell'intero sistema, incluso il tempo di risposta del sistema standard. Il valore non può essere inferiore al tempo di risposta totale minimo possibile dei componenti coinvolti, ossia del primo momento a partire dal quale il drive è in grado di decelerare. |
Parametro: SDI_TolleranzaPosizione[sTol]
|
Valore preimpostato |
0 |
|
Fascia valori Ampiezza passo |
0...65.535 1 |
|
Unita |
unità |
|
Descrizione |
Definisce la deviazione ammessa dalla posizione monitorata per determinare la direzione (STol nella figura qui sopra). Se dopo il decorso di t1 la deviazione supera il valore definito, la funzione SS1 viene attivata come funzione di fallback definita. 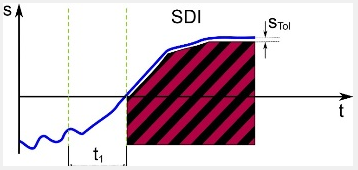
|
Elementi di dati di processo del modulo
Scopo e utilizzo degli elementi di dati di processo
Ogni modulo mette a disposizione elementi di dati di processo (segnali). Gli elementi di dati di processo possono essere:
-
segnali I/O trasmessi da o scritti su un morsetto di modulo.
-
segnali diagnostici per valutare lo stato dei canali d'ingresso/uscita o l'intero modulo.
-
segnali di controllo, ad esempio per abilitare un canale o regolare il modulo.
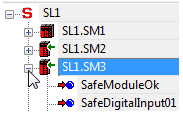
Gli elementi di dati di processo disponibili di un modulo sono elencati sotto al nodo del modulo nell'albero a sinistra della finestra 'Dispositivi'. Per visualizzare e utilizzare gli elementi di dati di processo, espandere il nodo del modulo con un clic sul simbolo '+'.
Esempio
Il modulo con ID SL1.SM3 mette a disposizione (tra gli altri) il segnale diagnostico SafeModuleOK e il segnale d'ingresso SafeDigitalInput01.
Dall'albero dei dispositivi, gli elementi di dati di processo si possono inserire nel codice SBF/LD di sicurezza mediante drag & drop (si veda il procedimento che segue). Con l'inserimento nel codice viene creata una variabile standard (non relativa alla sicurezza) o di sicurezza (a dipendere dal tipo di dati dell'elemento di dati di processo).
Procedimento: Come inserire elemento di dati di processo nel codice
-
Aprire il foglio di lavoro (FdL) di codice nel quale inserire l'elemento di dati di processo e creare/usare la variabile globale ad esso assegnato.
-
Nella finestra 'Dispositivi', aprire l'albero dei dispositivi a sinistra ed espandere il modulo (nodo dell'albero) che contiene l'elemento di dati di processo da utilizzare.
-
Trascinare l'elemento di dati di processo nel foglio di lavoro (FdL) di codice. Quando lasciate andare il tasto del mouse, appare il dialogo 'Variabili'.
Per inserire una variabile booleana in codice grafico in forma di contatto, tenere premuto il tasto <CTRL> mentre lasciate andare il tasto del mouse dopo aver trascinato la variabile dalla tabella dei morsetti di dispositivo nel FdL di codice.
-
Nel dialogo 'Variabili' viene proposto un nome predefinito che deriva dal nome dell'elemento di dati di processo. Accettare il nome proposto, selezionare una variabile globale esistente o dichiarare una nuova variabile globale immettendo un nuovo 'Nome', definendone il 'Tipo di dati' e assegnandola a un 'Gruppo'.
-
Confermare il dialogo 'Variabili' cliccando su 'OK'.
Viene ora aggiunta al cursore la sagoma di rettangolo della variabile. Può essere rilasciata nella posizione desiderata con un clic. La variabile si può collegare direttamente a un altro oggetto (ad es., un parametro formale) o inserire in una posizione libera.
La direzione dei dati dipende dal tipo di segnale.
L'applicazione di sicurezza può solo leggere i segnali d'ingresso e solo scrivere i segnali d'uscita.
I segnali diagnostici si possono usare per valutare e sorvegliare lo stato del modulo di sicurezza o di singoli canali I/O, ad esempio. Perciò le variabili globali create per e assegnate a segnali diagnostici sono leggibili da parte dell'applicazione.
I segnali di controllo si possono usare per abilitare l'operazione del modulo o per regolare/adattare il modulo al caso applicativo attuale (ad es., impostando una fascia di misura o un determinato comportamento del modulo). Perciò le variabili globali create per e assegnate a segnali di controllo sono scrivibili da parte dell'applicazione, in modo da poter controllare il modulo.
Rappresentazione degli elementi di dati di processo nell'albero dei dispositivi:
|
Icona |
Tipo di segnale |
Tipo di accesso |
|---|---|---|

|
Segnale d'ingresso di sicurezza o segnale diagnostico. |
lettura |

|
Segnale d'ingresso non relativo alla sicurezza (disponibile solo per il Safety Logic Controller). |
lettura |

|
Segnale d'uscita non relativo alla sicurezza (disponibile solo per il Safety Logic Controller) o segnale di comando. |
scrittura |

|
Segnale d'uscita o segnale di controllo di sicurezza. |
scrittura |
Quando un segnale standard (non relativo alla sicurezza) è connesso a un ingresso / un'uscita fisica, il tipo di dati della corrispondente variabile globale deve essere cambiato da "relativo alla sicurezza" a "standard" (ad esempio, da SAFEBOOL a BOOL) per escludere un utilizzo non corretto del segnale nel codice. Lo stesso vale quando un segnale relativo alla sicurezza viene usato solo come segnale standard nel codice. La modifica del tipo di dati può essere eseguito nei rispettivi fogli di lavoro per variabili o utilizzando le funzioni di conversione di tipo.
| AVVERTIMENTO | |
|---|---|
Nel prosieguo, i segnali I/O, diagnostici e di controllo del modulo attuale sono elencati e descritti nell'ordine nel quale sono riportati nell'albero dei dispositivi.
SafeModuleOK
|
Descrizione |
Indica lo stato della comunicazione tra il modulo di sicurezza e il Safety Logic Controller e quindi, dal punto di vista dell'applicazione di sicurezza, lo stato stesso del modulo. |
|
Tipo di segnale |
Diagnostico |
|
Tipo di dati |
SAFEBOOL |
|
Tipo di accesso |
Variabile può essere letta dall'applicazione di sicurezza. |
|
Valori possibili |
SAFEFALSE:
SAFETRUE:
|
Convalida obbligatoria dell'assegnazione per l'elemento di dati SafeModuleOK:
La verifica/convalida dell'assegnazione di ogni elemento di dati di processo a una variabile I/O globale è obbligatoria. Ciò vale in particolar modo per l'elemento di dati di processo SafeModuleOK che è disponibile per ogni modulo di sicurezza e ne indica lo stato. Dato che l'elemento di dati SafeModuleOK non può essere scritto, ad esempio applicando un segnale a un ingresso di modulo, il modulo da verificare deve essere estratto fisicamente dal bus TM5. Ne consegue che SafeModuleOK commuta a SAFEFALSE e la variabile I/O globale assegnata deve fare seguito. Per maggiori informazioni su come estrarre e reinserire un modulo, si veda il manuale d'utenza del modulo.
| AVVERTIMENTO | |
|---|---|
SafeAxisIn
|
Descrizione |
Indica l'identificatore dell'asse monitorato. Collegare questo segnale ai dati di ingresso S_AxisIN del blocco di funzione Preventa SF_SafeMotionControl nell'applicazione di sicurezza. In questo modo si crea un collegamento univoco tra il blocco di funzione e il corrispondente asse e, di conseguenza, un collegamento univoco tra l'asse e il controllore. |
|
Tipo di segnale |
Diagnostico |
|
Tipo di dati |
SAFEDWORD Valore iniziale: 0x0 |
|
Tipo di accesso |
Variabile può essere letta dall'applicazione di sicurezza. |
| AVVERTIMENTO | |
|---|---|
SafeFeedback
|
Descrizione |
Indica o la velocità calcolata (in [unità/s]) o il numero di incrementi fornito dall'encoder per l'asse monitorato. Il valore emesso dipende dall'impostazione dell'identificatore nel parametro ConfigFeedbackSicura (si veda la descrizione sopra).
Valutate questo dato di processo nella vostra applicazione si sicurezza per monitorare il movimento dell'asse. |
|
Tipo di segnale |
Diagnostico |
|
Tipo di dati |
SAFEDINT Valore iniziale: 0 |
|
Tipo di accesso |
Variabile può essere letta dall'applicazione di sicurezza. |
| AVVERTIMENTO | |
|---|---|
SafeAxisOut
|
Descrizione |
Specifica l'asse da controllare e monitorare. Collegare questo segnale al parametro formale d'uscita S_AxisOUT del blocco di funzione Preventa SF_SafeMotionControl nell'applicazione di sicurezza
NOTA:
Questa uscita non può rimanere scollegata. |
|
Tipo di segnale |
Segnale di controllo |
|
Tipo di dati |
SAFEDWORD Valore iniziale: 0x0 |
|
Tipo di accesso |
Variabile può essere scritta dall'applicazione di sicurezza. |
| AVVERTIMENTO | |
|---|---|
Indicazione dello stato funzionale
Se una funzione di sicurezza è attiva o meno viene indicato dai parametri formali d'uscita del blocco di funzione Preventa Motion SF_SafeMotionControl (non da elementi di dati di processo). Un'uscita SAFEBOOL è disponibile per ciascuna funzione leggibile e valutabile nell'applicazione di sicurezza. In aggiunta, sono disponibili uscite per indicare lo stato del monitoraggio rampa e lo stato complessivo della funzione di sicurezza.
Vedere il capitolo della Guida "BF Preventa Motion SF_SafeMotionControl" per maggiori informazioni sulle uscite di indicazione dello stato.