Funzione SOS – Safe Operation Stop (arresto del funzionamento in modo sicuro)
Descrizione generale del funzionamento
La funzione di arresto del funzionamento in modo sicuro SOS sorveglia il drive in stato di fermo mediante il controllo attivo della posizione (eseguito dal controllore standard (non relativo alla sicurezza)) e mediante il monitoraggio della posizione (eseguito dal modulo di sicurezza).
La funzione SOS impedisce che il motore possa scostarsi più di quanto definito dalla posizione di fermo (parametro dispositivo SOS_PositionTolerance[sTol]; si veda sotto, indicato come STol in figura). Il modulo drive mette energia a disposizione del motore per permettergli di resistere a forze esterne.
Monitoraggio del BF di sicurezza / modulo di sicurezza
La richiesta della funzione di sicurezza avviene all'inizio dell'intervallo di tempo t1 (segnale 'S_SOS_Request' nel diagramma). t1 si imposta con il parametro di dispositivo SOS_StartDelayTime[t1].
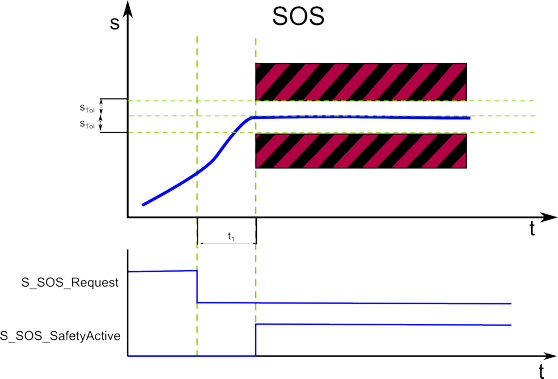
Entro l'intervallo di tempo t1, il controllore standard (non relativo alla sicurezza) riceve anch'esso la richiesta dal processo collegato e avvia la funzione di controllo del movimento in base alla logica e alla parametrizzazione del drive definita nell'applicazione standard (non relativa alla sicurezza).
Dopo il decorso di t1, la posizione S0 viene rilevata e inizia il monitoraggio di SOS.
SOS esegue un monitoraggio di sicurezza della posizione di fermo. Il controllo della posizione resta attivo. Il motore perciò può usare tutta la coppia di cui dispone per mantenere la posizione attuale. La posizione resta sorvegliata e deve rimanere entro i valori di tolleranza posizionale parametrizzati (STol).
Se i valori STol parametrizzati non sono superati dopo t1, il blocco di funzione commuta S_SOS_SafetyActive a SAFETRUE.
Funzione di fallback
Se il monitoraggio della posizione di fermo rileva uno scostamento dalla posizione di fermo superiore alla tolleranza posizionale impostata (STol in figura), la funzione STO viene eseguita automaticamente come funzione di fallback.
Applicazione
SOS è utile per applicazioni ove, per eseguire determinate operazioni, macchine o parti di macchina devono essere ferme e il drive deve applicare un momento torcente di tenuta. Il metodo del drive consiste nel mettere energia a disposizione del motore per permettergli di resistere al momento torcente esercitato da forze esterne.
Come implementare la funzione di sicurezza
Procedere come segue per implementare questa funzione di sicurezza nella vostra applicazione di sicurezza:
-
Nella finestra dei 'Dispositivi' di Machine Expert inserire un modulo di sicurezza per il drive utilizzato.
-
In Machine Expert – Safety, inserire un BF Preventa Motion SF_SafeMotionControl nel codice di sicurezza e collegarlo come occorre.
-
Nella finestra 'Dispositivi' di Machine Expert – Safety, marcare il modulo di sicurezza nell'albero dei dispositivi ed editare i parametri di sicurezza nel gruppo 'Mechanic'.
Per dettagli vedere la descrizione dei parametri del modulo opzionale di sicurezza Lexium 62 LXM/modulo opzionale di sicurezza Lexium 62 ILM.