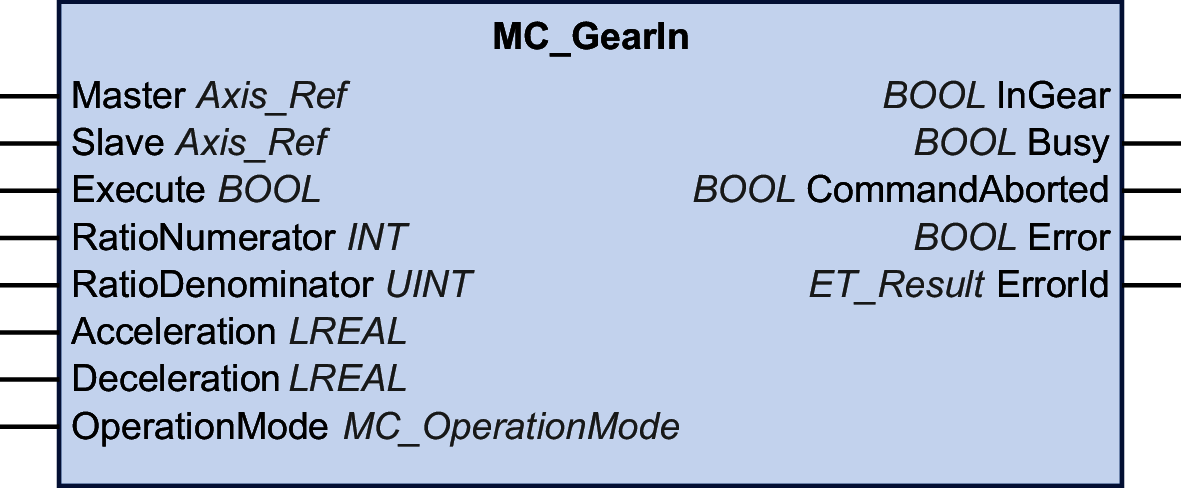
MC_GearIn
功能描述
此功能块根据运行模式,基于主轴和从轴的速度之间的位置或速度,以给定齿轮系数激活主轴和从轴的接合。
从轴同步沿循主轴的运动(位置或速度同步)。
输入 RatioNumerator 和 RatioDenominator 让您能够为从轴运动设置用户特有齿轮比。
-
在 Cyclic Synchronous Position 运行模式下,基于位置值执行接合。例如,在齿轮比为 1:2 的情况下,从轴运动距离为主轴运动距离的一半。
-
在 Cyclic Synchronous Velocity 运行模式下,基于速度值执行接合。例如,在齿轮比为 1:2 的情况下,从轴运动速度为主轴运动速度的一半。
输入
|
输入 |
数据类型 |
描述 |
|---|---|---|
|
Master |
Axis_Ref |
对将执行功能块的轴的引用。 |
|
Slave |
Axis_Ref |
对将执行功能块的轴的引用。 |
|
Execute |
BOOL |
值范围:FALSE,TRUE。 缺省值: FALSE。 输入 Execute 的上升沿可启动功能块。功能块持续执行,且输出 Busy 设置为 TRUE。 此功能块可在执行期间重启。目标值将被上升沿出现时该点的新值所覆盖。 |
|
RatioNumerator |
INT |
值范围:-2147483648...2147483647 缺省值:1 齿轮比的分子。
注: 值 0 无效。
|
|
RatioDenominator |
UINT |
值范围:1...2147489647 缺省值:1 齿轮比的分母。 |
|
Acceleration |
LREAL |
值范围:正 LREAL 值 缺省值:0 以用户自定义单位表示的加速度。 此输入处的值用于达到目标速度(加速度)。 |
|
Deceleration |
LREAL |
值范围:正 LREAL 值 以用户自定义单位表示的减速度。 缺省值:-1
注: 如果在输入 Deceleration 处显示的缺省值 –1 用于指示参数未被修改,则输入 Acceleration 的值也用于减速度。
在从轴速度的绝对值减小的情况下,这是 MC_GearIn 斜坡逼近阶段的加速度阈值。 |
|
OperationMode |
功能块的运行模式 缺省值:Position |
输出
|
输出 |
数据类型 |
描述 |
|---|---|---|
|
InGear |
BOOL |
值范围:FALSE,TRUE。 缺省值: FALSE。
|
|
Busy |
BOOL |
值范围:FALSE,TRUE。 缺省值: FALSE。
|
|
CommandAborted |
BOOL |
值范围:FALSE,TRUE。 缺省值: FALSE。
|
|
Error |
BOOL |
值范围:FALSE,TRUE。 缺省值: FALSE。
|
|
ErrorID |
此枚举提供诊断信息。 |