Adding a User Object or Group to a Collision Handler
Overview
This section explains how to insert a custom user object or group to a configured collision handler. For a basic example of definition for a collision handler, refer to Defining a Collision Handler.
-
It is possible to add custom objects or groups to the collision entity managed by a collision handler by accessing the methods inside the IF_CollisionHanlder.ifCollisionEntity interface.
-
Every time a collision handler is configured, the managed collision handler is automatically reset and then configured: this means that custom objects and groups are added after the standard configuration of a collision handler has been successfully performed, otherwise all the custom objects are lost.
An example of custom object is the case of a gripper mounted on the TCP, which update requires the position and orientation of the TCP.
An OBB modelling the gripper could be added to the default TCP group of a robot. For example, in the case of a Delta3Ax robot:
fbCollisionHandlerDelta3Ax.ifCollisionEntity.raifCollisionGroups[COD.ET_Delta3AxCollisionGroupIndex.TCP].AddCollisionObject(
i_ifCollisionObject := fbGripperOBB,
q_xError => xError,
q_etResult => etResult,
q_sResultMsg =>sResultMsg
);
Refer also to FB_CollisionHandlerDelta3Ax - SetParameters (Method).
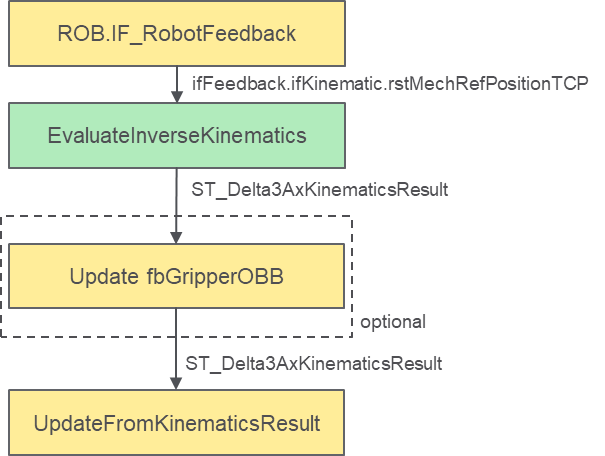
After adding a collision object, perform an update of the individual collision object fbGripperOBB. To do so, it is possible to rely on the result of the kinematics provided by EvaluateDirectKinematics or EvaluateInverseKinematics
Example of custom object updated using the result of the direct kinematics:
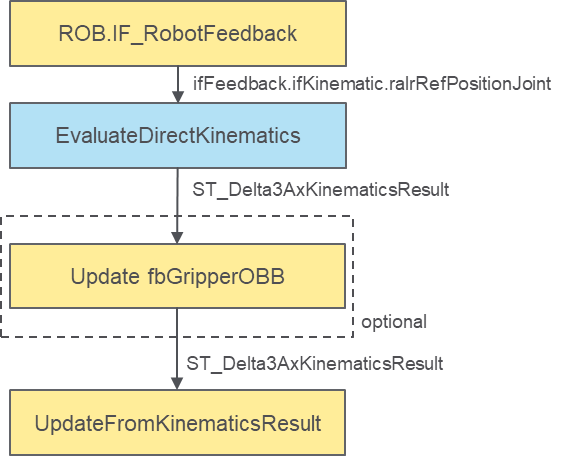
Example of custom object updated using the result of the direct kinematics:
-
The handling of fbGripperOBB inside the robot collision entity is automatically managed by the collision handler on a call of UpdateFromKinematicsResult.
-
Considering the example, the object is now part of the TCP group, meaning that it is affected by the flag fbCollisionHanlderDelta3Ax.xEnableTCPCollisionGroup.
-
In general, fbGripperOBB is now considered part of the robot collision entity for the purpose of collision and distance queries.