Funzione SS1 – Safe Stop 1 (arresto in modo sicuro 1)
Descrizione generale del funzionamento
La funzione di arresto in modo sicuro SS1 realizza un arresto rapido e controllato del drive. Controlla autonomamente la decelerazione del drive e poi attiva la funzione di sicurezza interna del drive Safe Torque Off (STO) (coppia disinserita in modo sicuro). Come risultato, la coppia del drive è disinserita e il motore non è più alimentato.
Alla funzione STO attiva consegue un'inibizione di avvio/riavvio (si veda la sezione sotto).
SS1 realizza un arresto di sicurezza funzionale conforme a un arresto di categoria 1 secondo EN 60204-1.
SS1 è la funzione di fallback definita per le funzioni di sicurezza da SLS1 a SLS4, SMS, SDIneg e SDIpos.
Monitoraggio del BF di sicurezza/logica di sicurezza
Il comportamento di monitoraggio del blocco di funzione dipende dalla parametrizzazione della logica di sicurezza:
-
Se il monitoraggio rampa è disattivato, il monitoraggio resta passivo fino al decorso del tempo t2 (si vedano la figura e la descrizione qui sotto).
-
Se il monitoraggio rampa è attivato, la logica di sicurezza sorveglia la decelerazione del motore come specificato nella rampa.
In entrambi i casi, la funzione SS1 sorveglia il motore e poi avvia la funzione STO per disinserire la coppia del drive. Tenere in conto che la funzione di sicurezza sorveglia soltanto il movimento. Il controllo dell'asse viene eseguito autonomamente dalla logica di sicurezza, indipendentemente dal BF.
La richiesta della funzione di sicurezza avviene all'inizio dell'intervallo di tempo t1 (segnale 'S_SS1_Request' nel diagramma). t1 si imposta con il parametro di dispositivo SS1_StartDelayTime[t1].
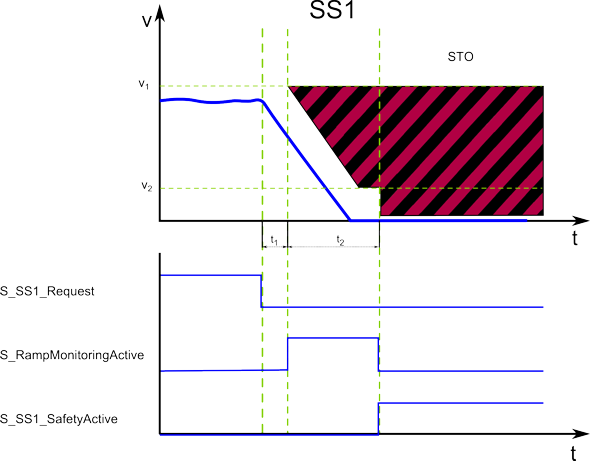
Entro l'intervallo di tempo t1 il controllore standard (non relativo alla sicurezza) riceve anch'esso la richiesta dal processo collegato e avvia la funzione di controllo del movimento in base alla logica e alla parametrizzazione del drive definita nell'applicazione standard (non relativa alla sicurezza).
Dopo il decorso di t1 viene eseguita la decelerazione del drive. La durata massima t2 permessa per questa fase di rampa discendente è definita dal parametro di dispositivo SS1_RampMonitoringTime[t2].
Al decorso di t2 viene attivata STO.
Durante t2, la decelerazione può essere monitorata impostando il parametro di dispositivo SS1_RampMonitoring = Activated.
Se il monitoraggio rampa è disattivato, la curva di decelerazione non viene monitorata. Durante t2 in questo caso è possibile anche un'accelerazione. Lo stato di fermo viene eseguito al decorso di t2 attivando la funzione STO.
Se il monitoraggio rampa è attivato, la curva di decelerazione viene monitorata e deve corrispondere alla rampa parametrizzata (come in figura). Altrimenti STO viene attivata come funzione di fallback definita.
Se la velocità zero viene raggiunta prima del decorso di t2, una tolleranza di velocità definita (parametro SS1_MinRampVelocity[v2]) dell'asse è permessa e viene monitorata in base a v2.
Quando lo stato di coppia disinserita del drive è raggiunto al termine della corretta esecuzione della funzione SS1, il blocco di funzione commuta S_SS1_SafetyActive = SAFETRUE (si veda il diagramma).
Altrimenti, se la funzione di fallback STO è stata attivata a causa di un errore come sopra descritto, il corrispondente stato viene segnalato con S_STO_SafetyActive = SAFETRUE.
Funzione di fallback
Se viene superato il valore parametrizzato SS1_RampMonitoringTime[t2] o (in caso di monitoraggio rampa attivato) se la rampa di decelerazione parametrizzata non è rispettata come definito o la tolleranza di velocità (v2 in figura) viene superata, la funzione STO viene eseguita automaticamente come funzione di fallback.
Applicazione
La funzione SS1 viene usata quando è richiesta la decelerazione controllata del drive con seguente coppia disinserita e stato di fermo, ad es. dopo un evento rilevante per la sicurezza.
SS1 è idonea per arrestare il più rapidamente possibile una grande massa di volano o per rallentare e fermare il più rapidamente possibile un drive che gira ad alta velocità. Esempi tipici sono mandrini di rettifica, centrifughe, dispositivi di stoccaggio e prelievo.
Inibizione di riavvio seguente a SS1
Dopo aver rimosso una funzione SS1 commutando il relativo ingresso S_SS1_Request da SAFEFALSE a SAFETRUE, diventa automaticamente attiva un'inibizione di riavvio per contribuire a prevenire il riavvio accidentale dell'asse. L'inibizione di riavvio si può rimuovere solo con un fronte di ascendente sull'ingresso Reset del blocco di funzione di sicurezza.
In base alla rilevante norma IEC 60204-1, la funzione SS1 esegue un arresto di categoria 1. Questa categoria di arresto implica una seguente inibizione di riavvio.
Parametri di dispositivo rilevanti del modulo di logica di sicurezza
Come editare i rilevanti parametri del dispositivo di sicurezza: Nella finestra 'Dispositivi' di EcoStruxure Machine Expert - Safety, ...
-
cliccare sul modulo di sicurezza nell'albero dei dispositivi.
-
Nell'Editore di parametrizzazione dispositivi a destra, scorrere fino alla sezione parametri che interessa (si veda l'intestazione della tabella sottostante).
-
Specificare i parametri per questa funzione di sicurezza elencati nella tabella qui sotto.
Per la maggior parte, i parametri qui immessi sono parametri di monitoraggio. Definiscono il comportamento di monitoraggio e così determinano se una funzione di sicurezza viene eseguita come definito o se è necessario eseguire una funzione di fallback in caso di errore. La parametrizzazione del drive (parametri di decelerazione ecc.) viene definita in EcoStruxure Machine Expert. Si veda l'argomento "Descrizione del funzionamento".
Per informazioni dettagliate sulle fasce di valori e i valori standard per questi parametri, vedere il corrispondente capitolo nella guida "Parametri e elementi per dati di processo del modulo di sicurezza" per il modulo di sicurezza utilizzato.
|
Sezione parametri: Safe_Stop_1 |
|
|---|---|
|
|
Tempo di ritardo dopo il quale parte il monitoraggio della funzione di sicurezza. Questo valore deve corrispondere al periodo di tempo che l'intero sistema di controllo del movimento richiede per reagire, ossia al tempo dopo il quale il controllore standard (non relativo alla sicurezza) può avviare la funzione di sicurezza richiesta dopo avere ricevuto la richiesta codificata in forma di word di controllo dei dati di processo tramite il bus SERCOS. Questo intervallo è denominato t1 nel diagramma dei tempi qui sopra. Il valore qui impostato deve essere pari o superiore al tempo di risposta dell'intero sistema, incluso il tempo di risposta del sistema standard. Il valore non può essere inferiore al tempo di risposta complessivo minimo possibile dei componenti coinvolti, ossia del primo momento a partire dal quale il drive è in grado di decelerare. |
|
|
|
|
|
Il parametro è rilevante solo se è attivo il monitoraggio rampa (si veda la riga precedente della tabella).
Il valore influisce sul gradiente della rampa di decelerazione (si veda il parametro |
|
|
Il parametro definisce la durata in millisecondi dopo la quale la velocità deve essere pari a zero (t2 in figura) e STO è attivato.
Se è attivato il monitoraggio rampa, questo valore influisce sul gradiente della rampa di decelerazione (si veda il parametro |
|
|
Deviazione di velocità permessa (velocità massima) durante lo stato di fermo (v2 nella figura qui sopra). Se la deviazione supera il valore definito, la funzione STO viene attivata come funzione di fallback. Per la funzione SS1, la posizione viene monitorata dopo il raggiungimento della velocità zero e finché t2 non è decorso, ossia finché STO non è ancora attivo.
Se è attivato il monitoraggio rampa, questo valore influisce sul gradiente della rampa di decelerazione (si veda il parametro |
La funzione SS1 è identica alla funzione STO se non vengono specificati valori nella relativa sezione dei parametri di dispositivo o se SS1_TempoRitardoInizio[t1] e SS1_TempoMonitoraggioRampa[t2] sono impostati a 0.
| AVVERTIMENTO | |
|---|---|
Ingressi/uscite rilevanti del BF e bit nella word di stato
-
Richiesta di monitoraggio funzione tramite l'ingresso S_SS1_Request = SAFEFALSE del BF.
-
Indicazione dello stato funzionale tramite l'uscita BF S_SS1_SafetyActive (SAFETRUE = funzione di sicurezza attivata) e bit 5 nell'uscita DWORD emessa su AxisStatus (TRUE = funzione di sicurezza attivata).