Die Verwendung der Bibliothek mit anderen Versionen der Software oder Firmware kann zu anderen Ergebnissen führen als in der vorliegenden Dokumentation beschrieben.
|
|
|
UNBEABSICHTIGTER GERÄTEBETRIEB |
|
oStellen Sie sicher, dass die Software und Firmware Versionen aufweisen, die von dieser Bibliothek unterstützt werden. oInformationen zur Kompatibilität erhalten Sie bei Ihrem Schneider Electric-Kundendienst. |
|
Die Nichtbeachtung dieser Anweisungen kann Tod, schwere Verletzungen oder Sachschäden zur Folge haben. |
oPacDrive LMC Eco
oPacDrive LMC Pro
oPacDrive LMC Pro2
oSoMachine Motion V4.3 SP1
PacDrive 3 V4.3 SP1
oPacDrive LMC Eco ab V1.54.20.3
oPacDrive LMC Pro ab V1.54.20.3
oPacDrive LMC Pro2 ab V1.54.20.3
In mehreren Situationen wurde die Geschwindigkeit der Bahnbewegung während der Bewegung auf Null gesetzt.
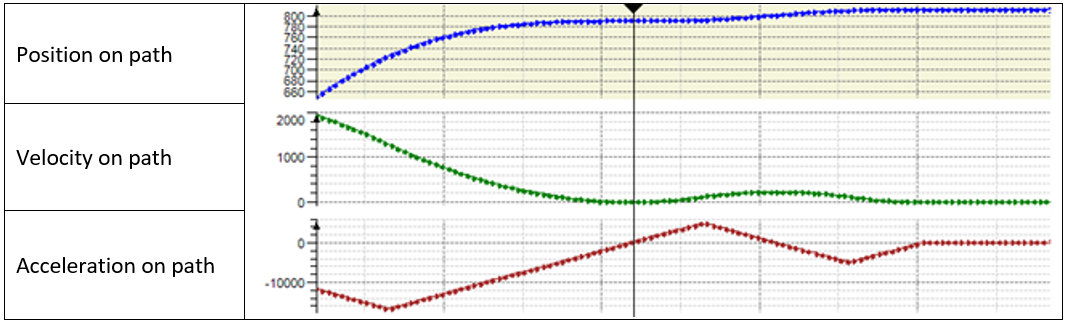
Situationen
1.Die Bahnbewegung des Roboters ist in der Auslaufphase zur Endposition. Ein Fahrbefehl IF_RobotMotion.MoveL(…), IF_RobotMotion.MoveC(…) oder IF_RobotMotion.MoveS(…) wird gesendet, um die Bahnbewegung vom Roboter zu erweitern.
2.Ein IF_RobotMotion.SetStopOnPath(…)-Befehl ist aktiv und die Bahnbewegung des Roboters ist in der Auslaufphase zur Stopp-Position auf der Bahn. Der Stopp-auf-Bahn wird mit dem IF_RobotMotion.ResetStopOnPath(…)-Befehl zurückgesetzt.
3.Der Parameter IF_RobotMotion.lrVelOverride wurde auf 0,0 gesetzt und die Bahnbewegung des Roboters ist in der Auslaufphase zum Stopp-auf-Bahn. Der Parameter IF_RobotMotion.lrVelOverride ist auf einen Wert größer als 0,0 gesetzt.
4.FB_Robot.xStart wurde auf FALSE gesetzt und die Bahnbewegung des Roboters ist in der Auslaufphase zum Stopp-auf-Bahn. FB_Robot.xStart wurde wieder auf TRUE gesetzt.
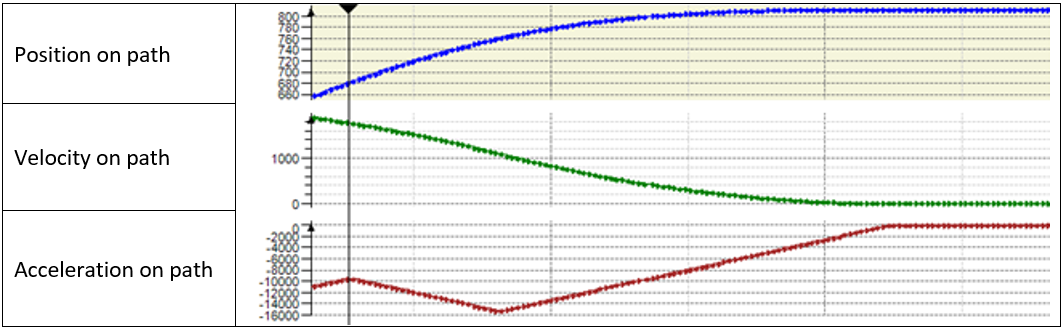
Falls es möglich ist, dann wird ein Bewegungsprofil ohne Stillstand während der Bahnbewegung berechnet.
Falls es möglich ist, dann wird ein Bewegungsprofil ohne Stillstand während der Bahnbewegung berechnet.
oKeine
oIn bestimmten Situationen wurde bei der Berechnung der voraussichtlichen Stopp-Position des TCP auf der verbundenen Bahn die Diagnosemeldung ET_Diag.UnexpectedProgramBehavior vom Roboter zurückgegeben. Die Berechnung der voraussichtlichen Stopp-Position wurde verbessert.
oWenn ein ColdStart des Roboters ausgeführt wird, dann wird die vorherige asynchrone Bewegung einer Hilfsachse gelöscht.
oWenn IF_RobotMotion.ClearSegmentsFromId(i_udiSegmentId := 0) zum Löschen alle Fahraufträge aufgerufen wird, werden ebenfalls alle Tracking- bzw. MoveAsync-Ereignisse gelöscht.
oWenn die Trackingrichtigung eines linearen Trackingsystems auf ET_RobotComponent.CartesianY oder ET_RobotComponent.CartesianZ eingestellt wird, wird die Änderung des linearen Trackingsystems durch den Aufruf von IF_RobotConfigurationAdvanced.ModifyCoordinateSystem2(…) vollständig unterstützt.
