White States sind Übergangszustände.
Beispielsweise während der Ausführung eines bereits gesendeten Befehls.
Je nach Ausführungszeit kann es möglich sein, dass diese Zustände nicht in der Überwachung erscheinen.
Gray States sind Endzustände.
Zum Beispiel wird ein Senden-Befehl erfolgreich ausgeführt.
Das Modul wartet darauf, dass ein nächster Befehl gesendet wird.
Allgemeines OpMode-Diagramm
Spezifisches OpMode-Diagramm
oOpMode-Diagramm - BrakeRelease
White States sind Übergangszustände.
Zum Beispiel wird ein Senden-Befehl ausgeführt.
Je nach Ausführungszeit kann es möglich sein, dass diese Zustände nicht in der Überwachung erscheinen.
Gray States sind Endzustände.
Zum Beispiel wird ein Senden-Befehl erfolgreich ausgeführt.
Das Modul wartet darauf, dass ein nächster Befehl gesendet wird.
HINWEIS: Der Befehl ET_Cmd.Abort kann zu jeder Zeit und in jedem Zustand gesendet werden.
ET_Cmd.Abort bewirkt den Wechsel in den Zustand ET_State.BrakeExit.
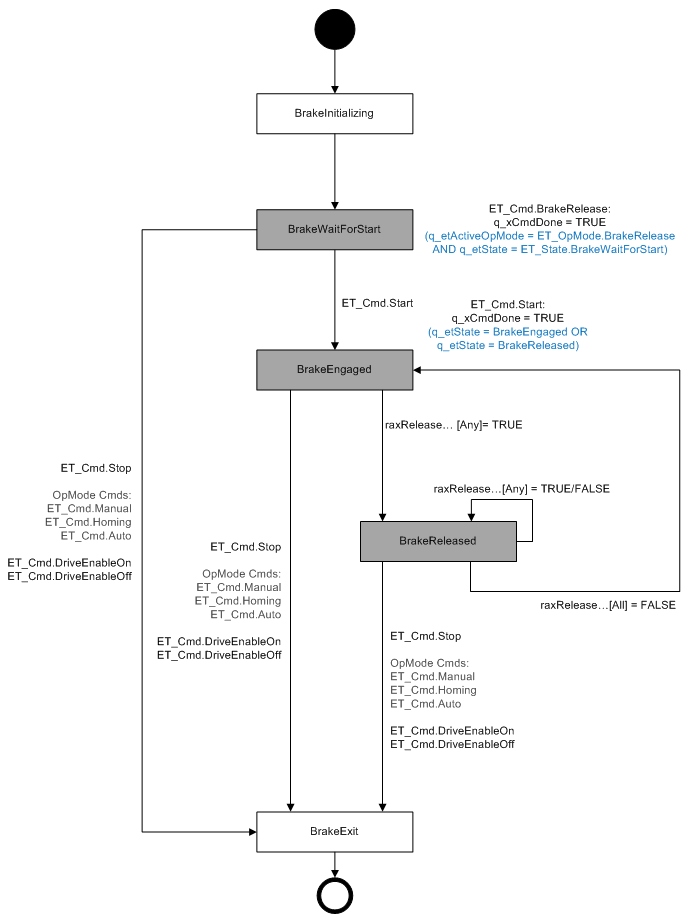
Stoppverhalten
Die Befehle mit dem Zielzustand ET_State.BrakeExit betätigen die freigegebenen Bremsen.
Gleichzeitiges Freigeben der Bremsen
Es ist nur möglich, alle Bremsen gleichzeitig freizugeben oder zumindest die Bremsen der Achsen C und D müssen gleichzeitig freigegeben werden. Wenn die Bremsen eines SCARA freigegeben werden, leuchtet die gelbe Anzeige.
Siehe auch ReleaseAxisInvalid.
OpMode BrakeRelease mit zusätzlichem Schaltkreis
Ist der zusätzliche Schaltkreis konfiguriert, dann zeigt der OpMode BrakeRelease ein anderes Verhalten. Dieser OpMode berücksichtigt außerdem das Öffnen und Schließen der Schütze.
Im Zustand BrakeWaitUntilContactorOpen oder BrakeWaitUntilContactorClosed werden die Schütze überwacht. Wenn nach einem Timeout (100 ms) eines der Schütze nicht reagiert, wird eine Ausnahme einschließlich einer SyncStopEL an die Ausnahmeliste gesendet.
Siehe auch ReleaseAxisInvalid und ContactorNotResponding.
Es wird in den OpMode BrakeReleaseButton gewechselt, sobald der Drucktaster am Roboter gedrückt wird. Dieser Modus kann nur durch Loslassen des Tasters beendet werden. Wird der Taster gedrückt, wird jeder andere Befehl abgelehnt und eine Ausnahme AsyncStop (stExceptionCmdImpossibleOverwrite) wird gesendet.
In den OpMode BrakeReleaseButton kann nur durch Drücken des Drucktasters gewechselt werden.
Wird der Drucktaster nicht gedrückt und der Befehl ET_Cmd.BreakereleaseButton gesendet, dann wird eine Ausnahme AsyncStop (stExceptionCmdUnknown) gesendet.
OpMode BrakeReleaseButton ohne zusätzlichen Schaltkreis
Wird der Bremsfreigabetaster gedrückt, wird eine Ausnahme einschließlich einer SyncStopEL gesendet. Diese Ausnahme zwingt die Hauptmaschine, ihren aktuellen OpMode zu verlassen.
Siehe auch BrakeReleaseButtonPressed.
OpMode BrakeReleaseButton mit zusätzlichem Schaltkreis
Wird der Bremsfreigabetaster gedrückt, wird eine Ausnahme einschließlich einer SyncStopEL gesendet. Diese Ausnahme zwingt die Hauptmaschine, ihren aktuellen OpMode zu verlassen.
Im Zustand BrakeWaitUntilContactorOpen oder BrakeWaitUntilContactorClosed werden die Schütze überwacht. Wenn nach einem Timeout (100 ms) eines der Schütze nicht reagiert, wird eine Ausnahme einschließlich einer SyncStopEL an die Ausnahmeliste gesendet.
Neben den Timeouts des OpMode BrakeReleaseButton wird das korrekte Verhalten der Schütze vom RoboticModule überwacht. Ungültige Zustände haben eine Ausnahme SyncStopEL zur Folge und verhindern einen Wechsel der Achse in die Lageregelung. Diese Ausnahmen können nur dann aus der Ausnahmeliste gelöscht werden, wenn der korrekte Zustand der Schütze wiederhergestellt wird.
Wenn die Bremsen eines Lexium S Robot freigegeben werden, leuchtet die gelbe Anzeige.
Siehe auch BrakeReleaseButtonPressed und ContactorNotResponding.
White States sind Übergangszustände.
Zum Beispiel wird ein Senden-Befehl ausgeführt.
Je nach Ausführungszeit kann es möglich sein, dass diese Zustände nicht in der Überwachung erscheinen.
Gray States sind Endzustände.
Zum Beispiel wird ein Senden-Befehl erfolgreich ausgeführt.
Das Modul wartet darauf, dass ein nächster Befehl gesendet wird.
HINWEIS: Der Befehl ET_Cmd.Abort kann zu jeder Zeit und in jedem Zustand gesendet werden.
ET_Cmd.Abort bewirkt den Wechsel in den Zustand ET_State.HomingExit.
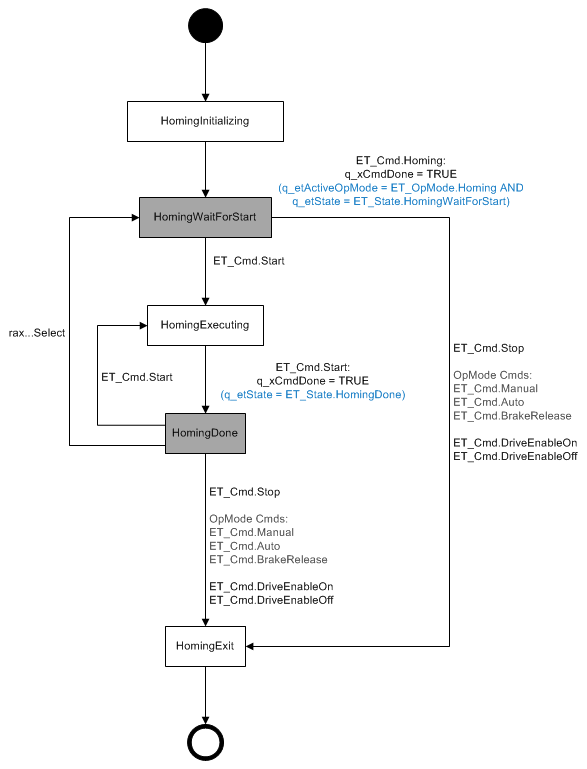
Stoppverhalten
ET_Cmd.Abort - Eine aktive Referenzierungsbewegung wird mit einem ControllerStop gestoppt.
Alle sonstigen Befehle mit dem Zielzustand ET_State.HomingExit können nur gesendet werden, wenn keine Referenzierung aktiv ist.
White States sind Übergangszustände.
Zum Beispiel wird ein Senden-Befehl ausgeführt.
Je nach Ausführungszeit kann es möglich sein, dass diese Zustände nicht in der Überwachung erscheinen.
Gray States sind Endzustände.
Zum Beispiel wird ein Senden-Befehl erfolgreich ausgeführt.
Das Modul wartet darauf, dass ein nächster Befehl gesendet wird.
HINWEIS: Der Befehl ET_Cmd.Abort kann zu jeder Zeit und in jedem Zustand gesendet werden.
ET_Cmd.Abort bewirkt den Wechsel in den Zustand ET_State.ManualExit.
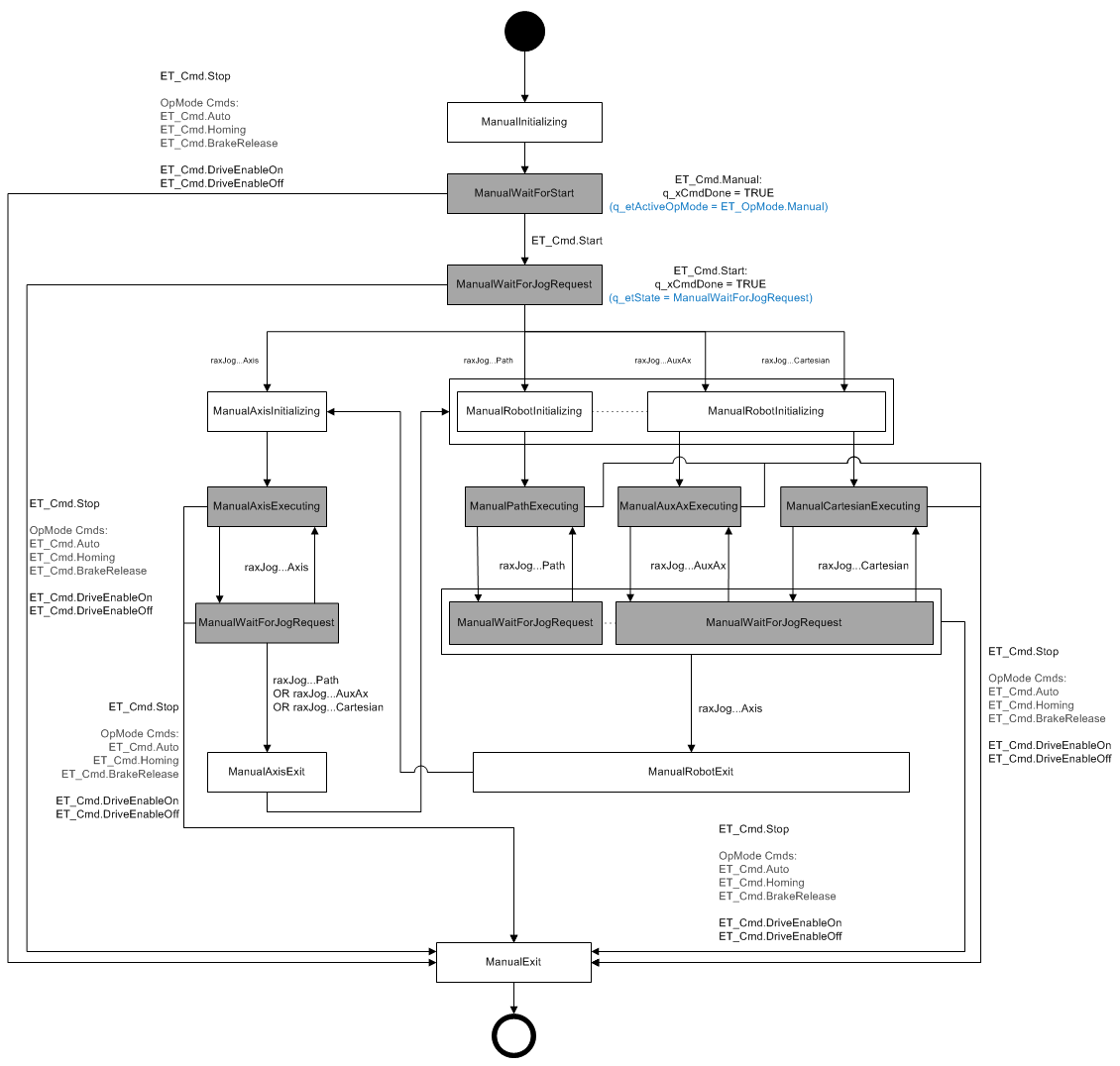
Stoppverhalten
ET_State.ManualAxisExecuting
Stoppverhalten, wenn Zustand ET_State.ManualAxisExecuting aktiv ist:
oET_Cmd.Stop - Die aktive Bewegung wird mit den konfigurierten manuellen Parametern für das Tippen der Achsen gestoppt.
oAlle anderen Befehle mit dem Zielzustand ET_State.ManualExit führen zu einem ControllerStop der aktiven Bewegung.
ET_State.ManualPathExecuting
Stoppverhalten, wenn Zustand ET_State.ManualPathExecuting aktiv ist:
oET_Cmd.Stop - Die aktive Bewegung wird mit den konfigurierten manuellen Parametern für das Bahn-Tippen gestoppt, die von IF_Manual.SetParameter für ROB.ET_RobotComponent.Path gesetzt wurden.
oAlle anderen Befehle mit dem Zielzustand ET_State.ManualExit führen zu einem Stopp auf der Bahn mit den konfigurierten Nothaltparametern, die durch IF_Configuration.SetEmergencyParameter der aktiven Bewegung gesetzt wurden.
ET_State.ManualAuxAxExecuting oder ET_State.ManualCartesianExecuting
Stoppverhalten, wenn ET_State.ManualAuxAxExecuting oder ET_State.ManualCartesianExecuting aktiv ist:
oET_Cmd.Stop - Die aktive Bewegung wird mit den konfigurierten manuellen Parametern für das AuxAx-Tippen gestoppt, die von IF_Manual.SetParameter für ROB.ET_RobotComponent.AuxAx1 gesetzt wurden, oder für das kartesische Tippen, die von IF_Manual.SetParameter für ROB.ET_RobotComponent.CartesianX, -Y, -Z gesetzt wurden.
oAlle sonstigen Befehle mit dem Zielzustand ET_State.ManualExit führen zu einem Stopp mit den konfigurierten Nothaltparametern, die von IF_Configuration.SetEmergencyParameter der aktiven Bewegung gesetzt wurden.
TPL.ET_Reaction.AsyncStop
Die Antriebe werden durch die Module deaktiviert. Der konfigurierte ControllerEnableStopMode (Antriebsparameter) wird zum Stoppen verwendet.
TPL.ET_Reaction.SyncStopEL
Die Roboterbewegung wird durch die Nothaltparameter gestoppt, eingestellt mit:
oIF_Configuration.SetEmergencyParameters(…)
oIF_Configuration.SetEmergencyParameters2(…)
Ein aktives Tracking wird mit dem Parameter gestoppt, eingestellt mit:
oROB.IF_RobotMotion.SetMaxAccelerationResultant(…)
Wenn die Roboterbewegung gestopped wird, dann werden die Antriebe deaktiviert.
TPL.ET_Reaction.SyncStopEH
Die Roboterbewegung wird durch die Nothaltparameter gestoppt, eingestellt mit:
oIF_Configuration.SetEmergencyParameters(…)
oIF_Configuration.SetEmergencyParameters2(…)
Ein aktives Tracking wird mit dem Parameter gestoppt, eingestellt mit:
oROB.IF_RobotMotion.SetMaxAccelerationResultant(…)
Wenn die Roboterbewegung gestoppt wird, dann werden die Antriebe NICHT deaktiviert.
TPL.ET_Reaction.StopEndOfCycle
Die Roboterbewegung wird durch die Bewegungsparameter gestoppt, eingestellt mit:
oIF_Manual.SetMaxDeceleration(…)
Nachdem die Tippbewegung vom Roboter gestoppt wurde, wird ein aktives Tracking mit dem Parameter gestoppt, eingestellt mit:
oROB.IF_RobotMotion.SetMaxAccelerationResultant(…)
White States sind Übergangszustände.
Zum Beispiel wird ein Senden-Befehl ausgeführt.
Je nach Ausführungszeit kann es möglich sein, dass diese Zustände nicht in der Überwachung erscheinen.
Gray States sind Endzustände.
Zum Beispiel wird ein Senden-Befehl erfolgreich ausgeführt.
Das Modul wartet darauf, dass ein nächster Befehl gesendet wird.
HINWEIS: Der Befehl ET_Cmd.Abort kann zu jeder Zeit und in jedem Zustand gesendet werden.
ET_Cmd.Abort bewirkt den Wechsel in den Zustand ET_State.AutoExit.
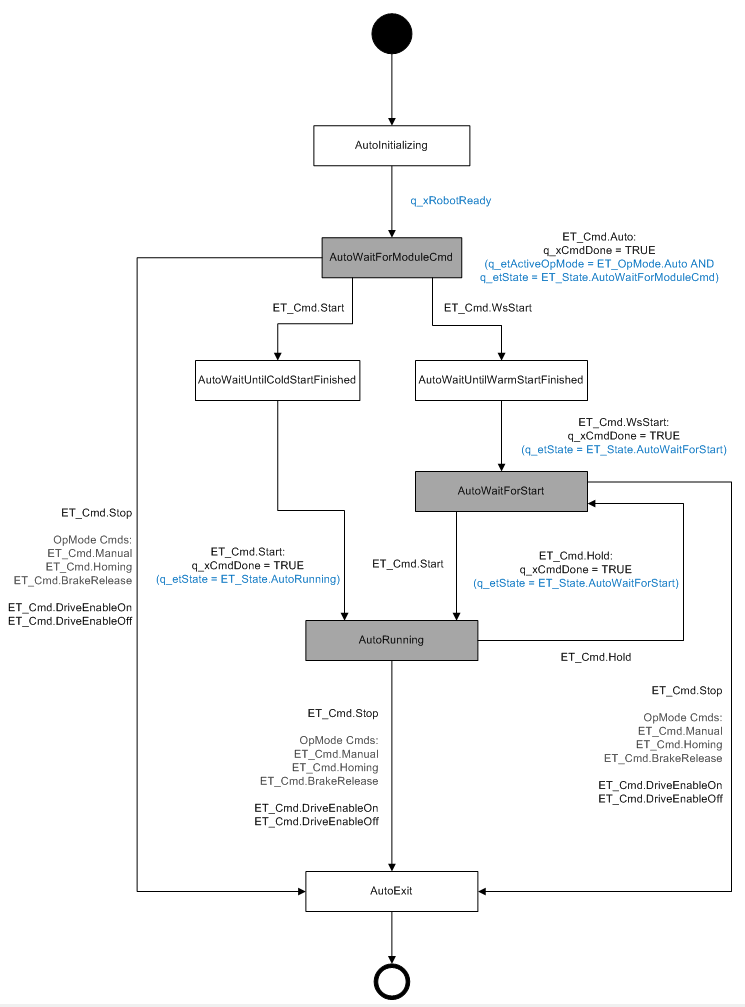
Stoppverhalten
ET_State.AutoRunning
Stoppverhalten, wenn der Zustand ET_State.AutoRunning aktiv und der Roboter in Bewegung ist:
oET_Cmd.Hold - Die aktive Bahnbewegung wird auf der Bahn mit den konfigurierten Bewegungsparametern gestoppt, die von ROB.IF_RobotMotion.SetMotionParameter für ROB.ET_RobotComponent.Path gesetzt wurden.
oET_Cmd.Stop - Die aktive Bahnbewegung wird auf der Bahn mit den konfigurierten Bewegungsparametern gestoppt, die von ROB.IF_RobotMotion.SetMotionParameter für ROB.ET_RobotComponent.Path gesetzt wurden.
oAlle anderen Befehle mit dem Zielzustand ET_State.AutoExit führen zu einem Stopp auf der Bahn mit den konfigurierten Nothaltparametern, die von IF_Configuration.SetEmergencyParameter gesetzt wurden.
TPL.ET_Reaction.AsyncStop
Die Antriebe werden durch die Module deaktiviert. Der konfigurierte ControllerEnableStopMode (Antriebsparameter) wird zum Stoppen verwendet.
TPL.ET_Reaction.SyncStopEL
Die Roboterbewegung wird durch die Nothaltparameter gestoppt, eingestellt mit:
oIF_Configuration.SetEmergencyParameters(…)
oIF_Configuration.SetEmergencyParameters2(…)
Ein aktives Tracking wird mit dem Parameter gestoppt, eingestellt mit:
oROB.IF_RobotMotion.SetMaxAccelerationResultant(…)
Wenn die Roboterbewegung gestopped wird, dann werden die Antriebe deaktiviert.
TPL.ET_Reaction.SyncStopEH
Die Roboterbewegung wird durch die Nothaltparameter gestoppt, eingestellt mit:
oIF_Configuration.SetEmergencyParameters(…)
oIF_Configuration.SetEmergencyParameters2(…)
Ein aktives Tracking wird mit dem Parameter gestoppt, eingestellt mit:
oROB.IF_RobotMotion.SetMaxAccelerationResultant(…)
Wenn die Roboterbewegung gestoppt wird, dann werden die Antriebe NICHT deaktiviert.
TPL.ET_Reaction.StopEndOfCycle
Die Bahnbewegung vom Roboter wird durch die Bewegungsparameter gestoppt, eingestellt mit:
oROB.IF_RobotMotion.SetMotionParameter(…)
oROB.IF_RobotMotion.SetMaxDeceleration(…)
oROB.IF_RobotMotion.SetRamp(…)
Nachdem die Bahnbewegung des Roboters gestoppt wurde, wird ein aktives Tracking mit dem Parameter gestoppt, eingestellt mit: