FB_CollisionHandlerSCARA4Ax - Allgemeine Informationen (General Information)
Überblick
|
Typ: |
Funktionsbaustein |
|
Verfügbar ab: |
V1.0.0.0 |
|
Übernommen aus: |
- |
|
Implementiert: |
IF_CollisionHandlerSCARA4Ax |
|
Versionen: |
Aktuelle Version |
Dieses Kapitel enthält Informationen zu folgenden Aspekten:
Beschreibung
Mithilfe dieses Kollisionshandlers kann ausgehend von einer Reihe von Parametern automatisch eine Kollisionseinheit konfiguriert werden, die der Struktur eines SCARA4Ax-Roboters entspricht. Dann kann die Kollisionseinheit auf der Grundlage der Gelenkpositionen oder der TCP-Position des Roboters aktualisiert werden.
Erweitert: FB_CollisionHandlerRobot
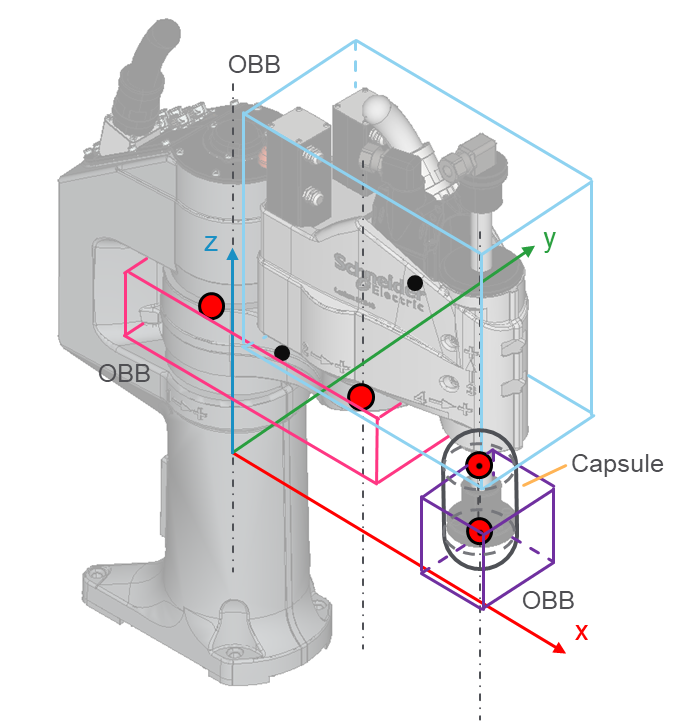
Die folgende Grafik zeigt die Konfiguration einer Kollisionseinheit für einen SCARA4Ax-Kollisionshandler:
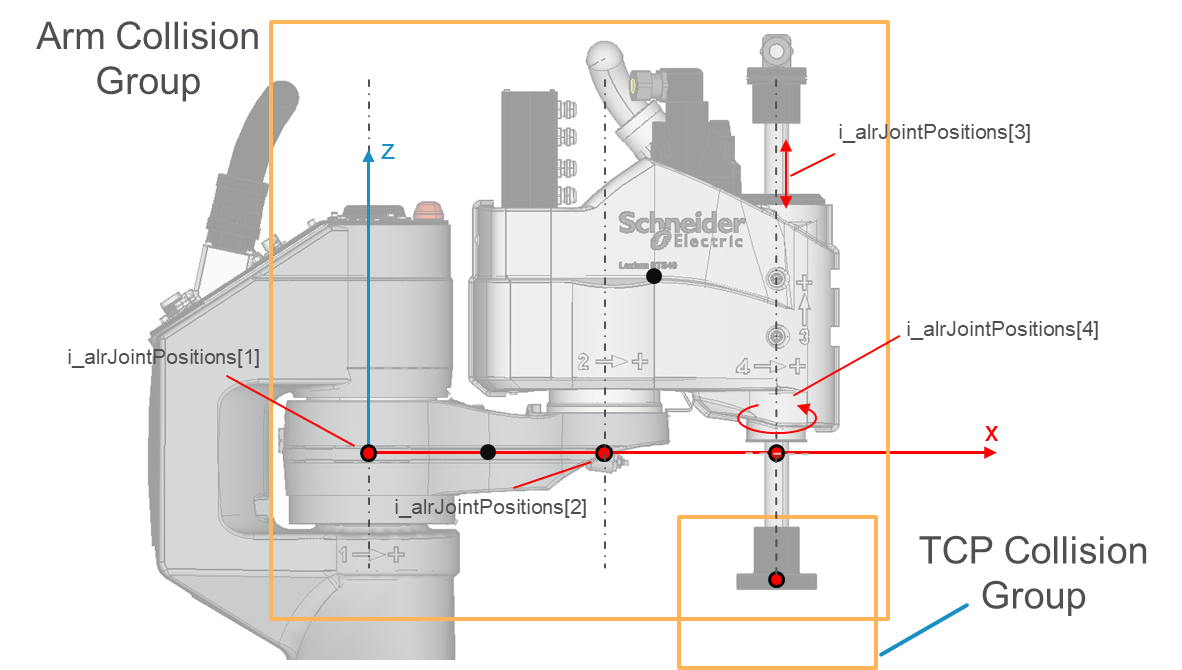
Die Kollisionseinheit eines SCARA4Ax-Kollisionshandlers wird anhand folgender Elemente konfiguriert:
-
Einem OBB (Oriented Bounding Box: Beliebig orientierter Quader), der der Armverbindung mit dem Mittelpunkt an der Mitte zwischen Ursprung und Armposition entspricht, wobei die Ausrichtung von Armrahmen und Armgröße gemäß der konfigurierten Länge, Breite und Höhe des Arms vorgegeben wird. Die Position des Mittelpunkts kann vom Vektor stArmMountPositionOffset beeinflusst werden.
-
Einem OBB, der der Armverbindung mit dem Mittelpunkt an der Mitte zwischen Arm- und Unterarmposition entspricht, wobei die Ausrichtung von Unterarmrahmen und -größe gemäß der konfigurierten Länge, Breite und Höhe des Unterarms vorgegeben wird. Die Position des Mittelpunkts kann vom Vektor stForearmMountPositionOffset beeinflusst werden.
-
Einer Kapsel, deren oberster Punkt der Unterarmposition plus dem konfigurierten Wert von lrEndEffectorStartZOffset an dessen Z-Koordinate und deren unterster Punkt der TCP-Position entspricht. Der Radius der Kapsel ist vom Wert von lrEndEffectorRadius abhängig.
-
Einem OBB, dessen Ausdehnung von den konfigurierten Werten von stTCPBoxHalfExtents vorgegeben und dessen Mittelpunkt als TCP-Position in Verbindung mit der konfigurierten stTCPBoxPosition festgelegt wird, die mit Bezug auf den TCP-Rahmen definiert wird.
Weitere Informationen finden Sie unter ST_SCARA4AxParameters.
Eigenschaften
|
Name |
Datentyp |
Zugriff |
Beschreibung |
|---|---|---|---|
|
xEnableArmCollision |
BOOL |
Get, Set |
Diese Eigenschaft ermöglicht die Aktivierung (Wert TRUE) bzw. Deaktivierung (Wert FALSE) der mit dem Arm des Roboters verbundenen Kollisionsgruppe. Die Elemente von ET_SCARA4AxCollisionGroupIndex können zur Indizierung der gewünschten Kollisionsgruppe verwendet werden.
HINWEIS: Eine deaktivierte Kollisionsgruppe wird von Kollisions- und Abstandsabfragen ignoriert.
|
|
xEnableTCPCollisionGroup |
BOOL |
Get, Set |
Wenn TRUE, dann ist die dem TCP-Modul entsprechende Kollisionsgruppe aktiviert, wenn FALSE, dann ist sie deaktiviert.
HINWEIS: Eine deaktivierte Kollisionsgruppe wird von Kollisions- und Abstandsabfragen ignoriert.
|
|
xUpdated |
BOOL |
Get |
Die Eigenschaft wird auf TRUE gesetzt, wenn der letzte Aufruf der Aktualisierungsmethode („Update“) erfolgreich war. Andernfalls wird FALSE ausgewählt.
HINWEIS: Diese Eigenschaft sollte einen TRUE-Wert aufweisen, bevor Sie den Funktionsbaustein mit einer der Kollisions- oder Abstandsabfragefunktionen verwenden.
|
|
xConfigured |
BOOL |
Get |
TRUE, wenn der Funktionsbaustein konfiguriert wurde, andernfalls FALSE. |
|
ifCollisionEntity |
Get |
Verweis auf die vom Kollisionshandler konfigurierte und aktualisierte Kollisionseinheit.
HINWEIS:
|
|
|
rstBaseOrientation |
REFERENZ ZU SE_Math.ST_Matrix3D |
Get |
Ausrichtung der Einheit mit Bezug auf ein globales Koordinatensystem. |
|
rstBasePosition |
REFERENZ ZU SE_Math.ST_Matrix3D |
Get |
Position der Einheit mit Bezug auf ein globales Koordinatensystem. |
|
etType |
Get |
Typ des Kollisionshandlers. Das bezieht sich auf den Typ des dargestellten Moduls. |