IF_Motion - SetVelocityLimitation (Methode)
Aufgabe
Einstellen einer begrenzten Geschwindigkeit zwischen einer definierten Startposition und einer definierten Endposition.
Beschreibung
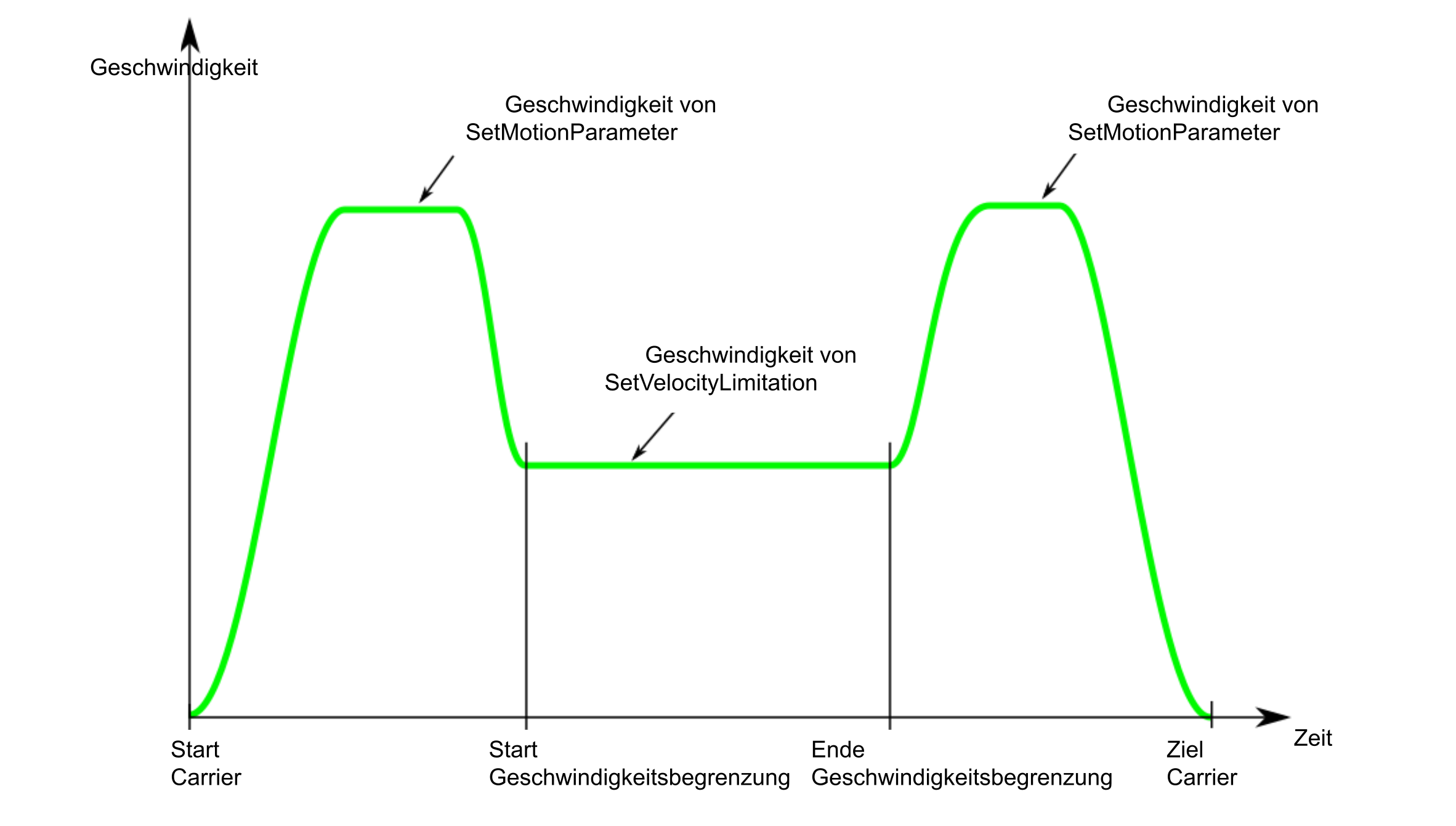
Die Methode SetVelocityLimitation funktioniert in Verbindung mit dem Fahrbefehl MoveGapControl. Wenn der Carrier mit dem Befehl MoveGapControl zu einem Ziel gesendet wird, kann für einen mit einer Start- und Endposition definierten Abschnitt eine begrenzte Geschwindigkeit eingestellt werden. Der Carrier verzögert vor der Startposition und beschleunigt nach der Endposition des Abschnitts mit begrenzter Geschwindigkeit.

|
Für eine visuelle Darstellung der Geschwindigkeitsbegrenzungsoption siehe die Videosequenz Geschwindigkeitsbegrenzung. |
Eingänge
|
Eingang |
Datentyp |
Wertebereich |
Einheit |
Beschreibung |
|---|---|---|---|---|
|
i_ lrVelocity |
LREAL |
0,0 ≤ i_ lrVelocity ≤ i_lrMaxVelocity |
mm/s |
Gibt die Geschwindigkeit für einen Carrier an der i_lrStartPosition an. Für weitere Informationen zum Parameter i_lrMaxVelocity siehe die Methode SetMotionParameter. |
|
i_lrStartPosition |
LREAL |
0,0 ≤ ≤ (1) |
mm |
Gibt die Startposition an, die der Carrier vor der Geschwindigkeitsbegrenzung haben muss. |
|
i_lrEndPosition |
LREAL |
0,0 ≤ ≤ (1) |
mm |
Gibt die Endposition an, die der Carrier nach der Geschwindigkeitsbegrenzung haben muss. |
|
i_lrGap |
LREAL |
0,0 ≤ ≤ (1) |
mm |
Gibt den Abstand des ausgewählten Carriers zum Carrier davor/dahinter für einen Abschnitt des Tracks mit Geschwindigkeitsbegrenzung an. Wenn der Wert des Parameters i_lrGap geringer ist als der durch die Parameter SetRefMinGapToCarrierInFront und/oder SetRefMinGapToCarrierBehind definierte Mindestabstand, wird der Abstand i_lrGap intern auf diesen Mindestabstand gesetzt. |
|
(1) Weitere Informationen zur Track-Länge finden Sie unter lrTrackLength. |
||||
Ausgänge
|
Ausgang |
Datentyp |
Beschreibung |
|---|---|---|
|
q_xError |
BOOL |
Mit TRUE wird angegeben, ob ein Fehler erkannt wurde. Für weitere Informationen siehe q_etResult und q_sResultMsg. |
|
q_etResult |
Gibt Diagnose- und Statusinformationen als numerischen Wert an. |
|
|
q_sResultMsg |
STRING [255] |
Stellt zusätzliche Diagnose- und Statusinformationen in Form von Textmeldungen bereit. |