SR_<Robot S-Series Name> - Allgemeine Informationen
|
Typ: |
Programm |
|
Verfügbar ab: |
V1.0.1.0 |
Dieses Kapitel enthält Informationen zu folgenden Aspekten:
oSchnittstelle bei Knotentyp 'PacDrive 3 Template'
oSchnittstelle bei Knotentyp 'Non Template'
Smart Template Robot S-Series Module.
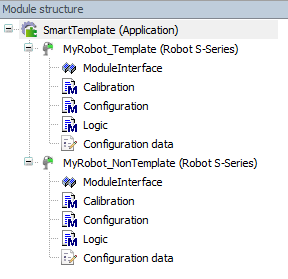
Schnittstelle bei Knotentyp 'PacDrive 3 Template'
|
Eingang/Ausgang |
Datentyp |
Beschreibung |
|---|---|---|
|
iq_stStandardModuleItf |
TPL.ST_StandardModuleInterface |
Standard-Modulschnittstelle (siehe ST_StandardModuleInterface). |
|
iq_stExceptionList |
TPL.ST_ExceptionList |
Ausnahmeliste (siehe ST_ExceptionList). |
|
iq_stLogDataList |
TPL.ST_LogDataList |
Protokolldatenliste (siehe ST_LogDataList). |
|
q_ifRobotFeedback |
ROB.IF_RobotFeedback |
Roboter-Schnittstelle für Rückmeldungen (siehe IF_RobotFeedback). |
Schnittstelle bei Knotentyp 'Non Template'
|
Eingang |
Datentyp |
Beschreibung |
|---|---|---|
|
i_xEnable |
BOOL |
Eine steigende Flanke an FALSE -> TRUE aktiviert den Baustein (POU), eine fallende Flanke an TRUE -> FALSE deaktiviert ihn. Ein deaktivierter Baustein (POU) führt keinerlei Aktionen aus. |
|
i_xAsyncStop |
BOOL |
Sofortigen asynchronen Stopp initiieren. Es ist kein Zugriff mehr auf den Prozess möglich, solange die Ausnahme ansteht. Es dürfen keine Befehle ausgeführt werden, solange die Reaktion ansteht. Bestimmte besondere Betriebsarten und Befehle, die zur Ausnahmebehebung notwendig sind, dürfen noch ausgeführt werden. |
|
i_xSyncStopEL |
BOOL |
Einen synchronen Stopp initiieren (überwacht durch einen Timeout = wartet, bis die Roboterbahnbewegung anhält). Deaktiviert den Prozess nach Abschluss des synchronen Stopps. Es ist kein Zugriff mehr auf den Prozess möglich, solange die Ausnahme ansteht. Wenn der Timeout (konfigurierbar) ausgelöst wird, geht die Funktion in einen asynchronen Stopp über. |
|
i_xSyncStopEH |
BOOL |
Einen synchronen Stopp initiieren (überwacht durch einen Timeout = wartet, bis die Roboterbahnbewegung anhält). Nach Abschluss des synchronen Stopps wird der Prozess NICHT deaktiviert. |
|
i_xStopEndOfCycle |
BOOL |
Einen Stopp zum Ende des Zyklus initiieren. Deaktiviert den Prozess NICHT. |
|
i_xDiagQuit |
BOOL |
Eine steigende Flanke an FALSE -> TRUE bricht eine aktive Ausnahme des Bausteins (POU) ab. |
|
Ausgang |
Datentyp |
Beschreibung |
|---|---|---|
|
q_xActive |
BOOL |
TRUE: Der Baustein (POU) ist aktiv. Wenn der Ausgang auf TRUE steht, während i_xEnable deaktiviert ist, muss der Baustein (POU) zuerst die laufende Verarbeitung abschließen, bevor der Ausgang zu FALSE übergehen kann. FALSE: Der Baustein (POU) ist nicht aktiv. |
|
q_xReady |
BOOL |
TRUE: Der Baustein (POU) ist funktionsbereit und kann Benutzerbefehle annehmen. FALSE: Der Funktionsbaustein ist nicht bereit für die Annahme von Benutzerbefehlen. |
|
q_etDiag |
GD.ET_Diag |
Allgemeingültige, bibliotheksunabhängige Aussage zur Diagnose. EinWert ungleich GD.ET_Diag.Ok entspricht einer Diagnosemeldung. |
|
q_etDiagExt |
RM.ET_DiagExt |
Bausteinspezifischer Ausgang zur Diagnose. q_etDiag = GD.ET_Diag.Ok -> Statusmeldung q_etDiag <> GD.ET_Diag.Ok -> Diagnosemeldung |
|
q_sMsg |
STRING[80] |
Ereignisabhängige Meldung, die detaillierte Informationen zum Diagnosezustand übergibt. |
|
q_xException |
BOOL |
Ein Fehler wurde erkannt und eine Ausnahme ist aktiv. |
|
q_xWarning |
BOOL |
Eine Empfehlung ist aktiv. |
|
q_etActiveOpMode |
RM.ET_OpMode |
Die aktive Betriebsart des Smart Template-Moduls für Roboter. |
|
q_xCmdActive |
BOOL |
Ein Befehl ist aktiv. |
|
q_etCmdActive |
RM.ET_Cmd |
Der aktive Befehl des Smart Template-Moduls für Roboter. |
|
q_xCmdDone |
BOOL |
Ein Befehl wird erfolgreich beendet. |
|
q_xAsyncStop |
BOOL |
Ein sofortiger asynchroner Stopp ist aktiv. Es ist kein Zugriff mehr auf den Prozess möglich, solange die Ausnahme ansteht. Es dürfen keine Befehle ausgeführt werden, solange die Reaktion ansteht. Bestimmte besondere Betriebsarten und Befehle, die zur Ausnahmebehebung notwendig sind, dürfen noch ausgeführt werden. |
|
q_xSyncStopEL |
BOOL |
Ein synchroner Stopp (überwacht durch einen Timeout = wartet, bis die Roboterbahnbewegung anhält) ist aktiv. Deaktiviert den Prozess nach Abschluss des synchronen Stopps. Es ist kein Zugriff mehr auf den Prozess möglich, solange die Ausnahme ansteht. Wenn der Timeout (konfigurierbar) ausgelöst wird, geht die Funktion in einen asynchronen Stopp über. |
|
q_xSyncStopEH |
BOOL |
Ein synchroner Stopp (überwacht durch einen Timeout = wartet, bis die Roboterbahnbewegung anhält) ist aktiv. Nach Abschluss des synchronen Stopps wird der Prozess NICHT deaktiviert. |
|
q_xStopEndOfCycle |
BOOL |
Ein Stopp am Ende des Zyklus ist aktiv. Deaktiviert den Prozess NICHT. |
|
q_ifRobotFeedback |
ROB.IF_RobotFeedback |
Roboter-Schnittstelle für Rückmeldungen (siehe IF_RobotFeedback). |
|
Eingang/Ausgang |
Datentyp |
Beschreibung |
|---|---|---|
|
iq_etCmd |
RM.ET_Cmd |
Übergabe eines Modulbefehls an das Modul. |
|
Name |
Datentyp |
Zugriff |
Beschreibung |
|---|---|---|---|
|
ifRobotFeedback |
ROB.IF_RobotFeedback |
Lesen |
Roboter-Schnittstelle für Rückmeldungen (siehe IF_RobotFeedback). |
|
Name |
Beschreibung |
|---|---|
|
Ausführung des Abgleichs für einen Robot S-Series. |
|
|
Konfiguration zusätzlicher Funktionen (zum Beispiel Tracking). |
|
|
Logik für den Robot S-Series (zum Beispiel Bewegungslogik). |
|
|
Registrierung des Smart Template-Moduls Robot S-Series Module beim Application Logger. |
|
|
Einstellung des Parameters, um den Regelkreis der Achsen des Robot S-Series zu beeinflussen. |
|
|
Lesen des Parameters, der den Regelkreis der Achsen des Robot S-Series beeinflusst. |
|
|
Setzen von Limits für den gültigen Bereich der Achspositionen. |
|
|
Auslesen von Limits für den aktuellen Anwenderbereich der Achspositionen. |