Using the library with other versions of software or firmware may have results other than described in the present documentation.
|
|
|
UNINTENDED EQUIPMENT OPERATION |
|
oBe sure that the software and firmware are of the versions supported by this library. oContact your Schneider Electric service representative for compatibility information. |
|
Failure to follow these instructions can result in death, serious injury, or equipment damage. |
oPacDrive LMC Eco
oPacDrive LMC Pro
oPacDrive LMC Pro2
oSoMachine Motion V4.3 SP1
PacDrive 3 V4.3 SP1
oPacDrive LMC Eco V1.54.20.3 or greater
oPacDrive LMC Pro V1.54.20.3 or greater
oPacDrive LMC Pro2 V1.54.20.3 or greater
oLinear Tracking System
oIF_RobotConfiguration.AddLinearTrackingSystem3(…)
By using this method to configure a linear tracking system, it is possible to define the system ID.
oAdditional Transformation TCP
oIF_RobotConfigurationAdvanced.AdditionalTransformationTCP(…)
An additional user-defined transformation for the TCP can be configured.
oResulting Acceleration Limitation Parameters
oIF_RobotConfigurationAdvanced.SetResAccLimitParameters(…)
Additional configuration parameters for the functionality to limit the resulting acceleration of a robot space movement can be set.
oIF_RobotConfigurationAdvanced.GetResAccLimitParameters(…)
Additional configuration parameters for the functionality to limit the resulting acceleration of a robot space movement can be read.
oEstimated Stop Position AuxAx
oIF_RobotFeedbackMotionAuxiliaryAxis.lrEstimatedStopPosition
Returns the estimated stop position of an active movement of an auxiliary axis.
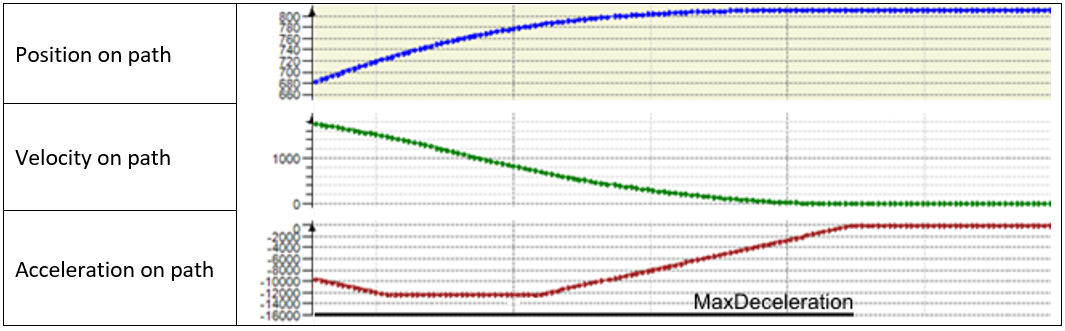
oTarget Extension of a Connected Path
In several situations, the velocity of the path movement gets zero during the movement.
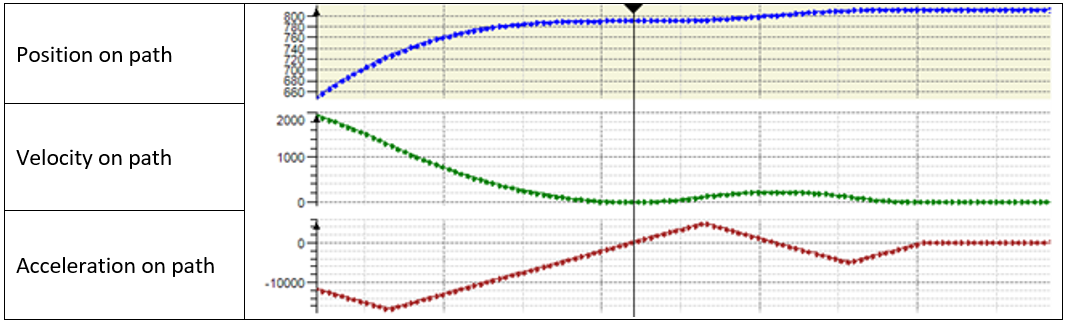
Situations:
a.The path movement of the robot is in the deceleration phase to its end position. A motion command IF_RobotMotion.MoveL(…), IF_RobotMotion.MoveC(…), or IF_RobotMotion.MoveS(…) is sent to extend the path movement of the robot.
b.A IF_RobotMotion.SetStopOnPath(…) command is active and the path movement of the robot is in the deceleration phase to the stop position on path. The stop-on-path is reset by the IF_RobotMotion.ResetStopOnPath(…) command.
c.The parameter IF_RobotMotion.lrVelOverride was set to 0.0 and the path movement of the robot is in the deceleration phase to stop-on-path. The parameter IF_RobotMotion.lrVelOverride is set to a value greater than 0.0.
d.FB_Robot.xStart was set to FALSE and the path movement of the robot is in the deceleration phase to stop-on-path. FB_Robot.xStart is set to TRUE again.
If it is possible, a motion profile is calculated without zero velocity during the path movement.
oLicense Points
License points are no longer required by the following functions:
oIF_RobotConfiguration.Delta2Ax
oIF_RobotConfiguration.Delta3Ax
oIF_RobotConfiguration.Articulated2Ax
oIF_RobotConfiguration.SchneiderElectricRobot
oTransform Coordinate
The Application Logger entry of a successful call of the method IF_RobotMotion.TransformCoordinate(…) is removed.
oCalculating the Estimated Stop Position
oUnder certain conditions, the diagnostic message ET_Diag.UnexpectedProgramBehavior was returned by the robot during calculating the estimated stop position of the TCP on the connected path.
Calculating the estimated stop position is improved.
oCalculating a Motion Profile
oUnder certain conditions, the diagnostic message ET_Diag.UnexpectedProgramBehavior was returned by a move command (MoveL, MoveS, MoveC) in connection with calculating the motion profile of the connected path.
oUnder certain conditions, the diagnostic message ET_Diag.ExecutionAborted - ET_DiagExt.SwitchTimeInvalid was returned by the robot.
oUnder certain conditions, the diagnostic message ET_Diag.ExecutionAborted - ET_DiagExt.PathPositionEndExceeded was returned by the robot.
Calculating the motion profile is improved.
oSoftware Watchdog Caused by Calculating Spline Points
oFB_EllipticSpline.CalcSplineExtended(…)
Calling this method could lead into a software watchdog.
Calculating spline points is improved.
oHardware Watchdog Caused by Enabling the Robot
oFB_Robot.xEnable TRUE -> FALSE
Enabling the robot could lead into a hardware watchdog.
Enabling the robot is improved.
oTarget Position of Connected Path Not Reached
oUnder certain conditions, the target position of a connected path has not been reached.
IF_RobotFeedback.xInMotion returns FALSE, but IF_RobotFeedback.xInTarget returns not TRUE.
Reaching the target position of a connected path is improved.
oStop on Path
oIF_RobotMotion.SetStopOnPath(…)
The method can be called successfully even if IF_RobotMotion.lrVelOverride was set to 0.0.
Calling the method is improved.
oCalculating an Elliptic Spline
FB_EllipticSpline.CalcFullSpline(…)
The method returns the correct spline points even if a working plane is configured and the method is called more than once without any change of the input parameters.
Calculating an elliptic spline is improved.
oSercos Write Cycle Overflow
FB_Robot.xEnable TRUE -> FALSE
Under certain conditions, the diagnostic message 8507 Sercos write cycle overflow was caused by disabling the robot.
Disabling the robot is improved.
