Die Verwendung der Bibliothek mit anderen Versionen der Software oder Firmware kann zu anderen Ergebnissen führen als in der vorliegenden Dokumentation beschrieben.
|
|
|
UNBEABSICHTIGTER GERÄTEBETRIEB |
|
oStellen Sie sicher, dass die Software und Firmware die Versionen aufweisen, die von dieser Bibliothek unterstützt werden. oInformationen zur Kompatibilität erhalten Sie bei Ihrem Schneider Electric-Kundendienst. |
|
Die Nichtbeachtung dieser Anweisungen kann Tod, schwere Verletzungen oder Sachschäden zur Folge haben. |
oPacDrive LMC Eco
oPacDrive LMC Pro
oPacDrive LMC Pro2
oSoMachine Motion V4.3 SP1
PacDrive 3 V4.3 SP1
oPacDrive LMC Eco ab V1.54.20.3
oPacDrive LMC Pro ab V1.54.20.3
oPacDrive LMC Pro2 ab V1.54.20.3
oLineares Trackingsystem
oIF_RobotConfiguration.AddLinearTrackingSystem3(…)
Durch den Einsatz dieser Methode zur Konfiguration eines linearen Trackingsystems kann die System-ID definiert werden.
oZusätzlicher Transformations-TCP
oIF_RobotConfigurationAdvanced.AdditionalTransformationTCP(…)
Es kann eine zusätzliche, anwenderspezifischeTransformation für den TCP konfiguriert werden.
oParameter zur Begrenzung der resultierenden Beschleunigung
oIF_RobotConfigurationAdvanced.SetResAccLimitParameters(…)
Es können zusätzliche Konfigurationsparameter für die Funktion zur Begrenzung der aus einer Raumbewegung des Roboters resultierenden Beschleunigung eingestellt werden.
oIF_RobotConfigurationAdvanced.GetResAccLimitParameters(…)
Es können zusätzliche Konfigurationsparameter für die Funktion zur Begrenzung der aus einer Raumbewegung des Roboters resultierenden Beschleunigung gelesen werden.
oVoraussichtliche Stopp-Position AuxAx
oIF_RobotFeedbackMotionAuxiliaryAxis.lrEstimatedStopPosition
Gibt die voraussichtliche Stopp-Position für eine aktive Verfahrbewegung einer Hilfsachse zurück.
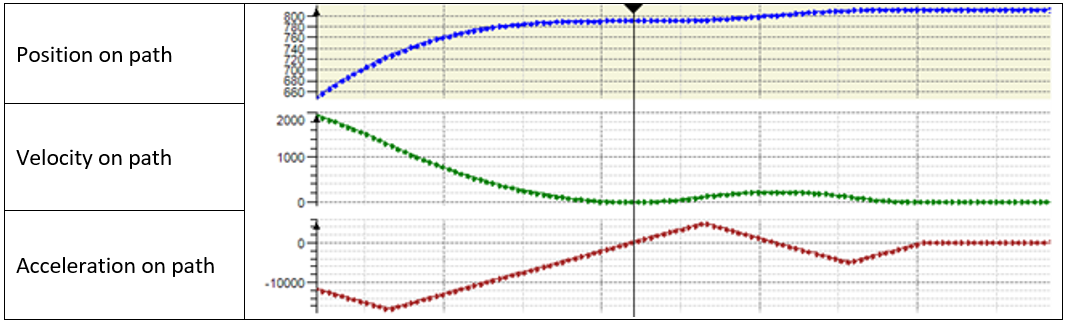
oZielerweiterung einer verbundenen Bahn
In mehreren Situationen wurde die Geschwindigkeit der Bahnbewegung auf Null gesetzt während der Bewegung.
Situationen:
a.Die Bahnbewegung des Roboters ist in der Auslaufphase zur Endposition. Ein Fahrbefehl IF_RobotMotion.MoveL(…), IF_RobotMotion.MoveC(…) oder IF_RobotMotion.MoveS(…) wird gesendet, um die Bahnbewegung vom Roboter zu erweitern.
b.Ein IF_RobotMotion.SetStopOnPath(…)-Befehl ist aktiv und die Bahnbewegung des Roboters ist in der Auslaufphase zur Stopp-Position auf der Bahn. Der Stopp-auf-Bahn wird mit dem IF_RobotMotion.ResetStopOnPath(…)-Befehl zurückgesetzt.
c.Der Parameter IF_RobotMotion.lrVelOverride wurde auf 0,0 gesetzt und die Bahnbewegung des Roboters ist in der Auslaufphase zum Stopp-auf-Bahn. Der Parameter IF_RobotMotion.lrVelOverride ist auf einen Wert größer als 0,0 gesetzt.
d.FB_Robot.xStart wurde auf FALSE gesetzt und die Bahnbewegung des Roboters ist in der Auslaufphase zum Stopp-auf-Bahn. FB_Robot.xStart wurde wieder auf TRUE gesetzt.
Falls es möglich ist, dann wird ein Bewegungsprofil ohne Stillstand während der Bahnbewegung berechnet.

oLizenzpunkte
Für folgende Funktionen sind keine Lizenzpunkte mehr erforderlich:
oIF_RobotConfiguration.Delta2Ax
oIF_RobotConfiguration.Delta3Ax
oIF_RobotConfiguration.Articulated2Ax
oIF_RobotConfiguration.SchneiderElectricRobot
oTransformation der Koordinaten
Der Eintrag im Application Logger für einen erfolgreichen Aufruf der Methode IF_RobotMotion.TransformCoordinate(…) wurde entfernt.
oBerechnung der voraussichtlichen Stopp-Position
oUnter bestimmten Bedingungen wurde bei der Berechnung der voraussichtlichen Stopp-Position des TCP auf der verbundenen Bahn die Diagnosemeldung ET_Diag.UnexpectedProgramBehavior vom Roboter zurückgegeben.
Die Berechnung der voraussichtlichen Stopp-Position wurde verbessert.
oBerechnung eines Bewegungsprofils
oUnter bestimmten Bedingungen wurde die Diagnosemeldung ET_Diag.UnexpectedProgramBehavior von einem Verfahrbefehl (MoveL, MoveS, MoveC) in Verbindung mit der Berechnung des Bewegungsprofils der verbundenen Bahn zurückgegeben.
oUnter bestimmten Bedingungen wurde die Diagnosemeldung ET_Diag.ExecutionAborted - ET_DiagExt.SwitchTimeInvalid vom Roboter zurückgegeben.
oUnter bestimmten Bedingungen wurde die Diagnosemeldung ET_Diag.ExecutionAborted - ET_DiagExt.PathPositionEndExceeded vom Roboter zurückgegeben.
Die Berechnung des Bewegungsprofils wurde verbessert.
oDurch die Berechnung der Kurvenpunkte ausgelöster Software-Watchdog
oFB_EllipticSpline.CalcSplineExtended(…)
Der Aufruf dieser Methode konnte einen Software-Watchdog zur Folge haben.
Die Berechnung der Kurvenpunkte wurde verbessert.
oDurch die Aktivierung des Roboters ausgelöster Hardware-Watchdog
oFB_Robot.xEnable TRUE -> FALSE
Die Aktivierung des Roboters konnte einen Hardware-Watchdog zur Folge haben.
Die Aktivierung des Roboters wurde verbessert.
oZielposition der verbundenen Bahn nicht erreicht
oUnter bestimmten Bedingungen wurde die Zielposition einer verbundenen Bahn nicht erreicht.
IF_RobotFeedback.xInMotion gibt FALSE zurück, aber IF_RobotFeedback.xInTarget kehrt nicht zu TRUE zurück.
Die Erreichung der Zielposition einer verbundenen Bahn wurde verbessert.
oStopp-auf-Bahn
oIF_RobotMotion.SetStopOnPath(…)
Die Methode kann erfolgreich aufgerufen werden, selbst wenn IF_RobotMotion.lrVelOverride auf 0.0 gesetzt wurde.
Der Aufruf der Methode wurde verbessert.
oBerechnung einer elliptischen Kurve
FB_EllipticSpline.CalcFullSpline(…)
Die Methode gibt die richtigen Kurvenpunkte zurück, selbst wenn ein Arbeitsbereich konfiguriert wurde und die Methode mehrmals ohne Änderung der Eingangsparameter aufgerufen wird.
Die Berechnung einer elliptischen Kurve wurde verbessert.
oÜberlauf des Sercos-Schreibzyklus
FB_Robot.xEnable TRUE -> FALSE
Unter bestimmten Bedingungen wurde die Diagnosemeldung 8507 Sercos write cycle overflow durch die Deaktivierung des Roboters ausgelöst.
Die Deaktivierung des Roboters wurde verbessert.
